赫兹接触¶
一个二维接触力学问题:一个圆形弹性压头被压入一块矩形弹性体;界面上的接触压力应当与赫兹解析解相吻合。脚本 examples/solid/hertzian_contact/hertzian_contact.py 用 罚函数法 求解——通过向总势能中添加一个二次罚能量来施加接触约束,然后用 L-BFGS 最小化。
问题¶
两个线弹性物体(\(E = 1000\) Pa,\(\nu = 0.3\)):
压头 —— 半径为 \(R = 1.0\) 的完整圆盘,用 Tri6 二次三角形单元划分网格,圆心位于 \((-1.0, 0)\),使其最右端点恰好位于原点。其最左侧的弧段(\(x < -1.8\))被固定。
弹性体 —— 矩形 \([0, 1] \times [-1, 1]\),用 Quad9 二次四边形单元划分网格。右边缘(\(x = 1\))施加规定位移 \(u_x = -0.15\)(向左推,压向压头)。
接触界面是竖直线 \(x = 0\)。随着弹性体向左移动,压头被压缩,并形成接触斑。
罚函数接触¶
无摩擦法向接触是约束 \(g(\mathbf{x}) \geq 0\),其中 \(g\) 是 间隙函数(两个表面之间的有符号距离,分离时为正)。罚函数法用接触能量来代替这一不等式约束
其中 \(\langle x \rangle_+ = \max(x, 0)\),\(k_p = 2 \times 10^6\) 是罚刚度。当 \(k_p \to \infty\) 时约束被精确施加,但问题会变得病态;实际中 \(k_p\) 通常取为比弹性刚度大几个数量级。
在每个 L-BFGS 步中被最小化的总能量为
前两项来自 LinearElasticityElementAssembler 的能量形式(小应变二次能量);接触项则在脚本中单独实现。
点对段检测¶
界面 \(\Gamma_c\) 被划分为一个物体上的“从节点”和另一个物体上的“主段”。对每个从节点,脚本将其投影到最近的主段上,计算有符号的法向间隙,并累加罚函数贡献。
脚本采用 双向 处理(每个物体的界面节点相对于另一个物体都作为从节点),这给出了对称的表述,并避免了单主单从选择所带来的偏差。
用 L-BFGS 进行能量最小化¶
这一模式与 超弹性梁(新胡克) 中介绍的相同:两个网格共用一个 u 参数,边界条件在闭包内部施加,由 autograd 提供梯度。由于间隙函数依赖于当前构型,接触项在每次迭代中都会重新计算:
def closure():
optimizer.zero_grad()
u_active = apply_bcs(u)
E_elastic_1 = model_circle.energy(...)
E_elastic_2 = model_block.energy(...)
E_contact = penalty_contact_energy(u_active, k_p)
total = E_elastic_1 + E_elastic_2 + E_contact
total.backward()
return total
for it in range(25):
optimizer.step(closure)
与赫兹解析解的对比¶
对于弹性圆柱与半空间之间的二维平面应变接触,赫兹理论给出抛物线形的压力分布:
其中等效模量 \(E^*\) 和等效半径 \(R^*\) 由两体几何导出。脚本从收敛解中提取接触压力,并将其叠加到 hertzian_contact.png 中的解析曲线上——只要接触斑附近的网格足够细,有限元结果就吻合得很好(chara_length=0.1 是一个合理的起点)。
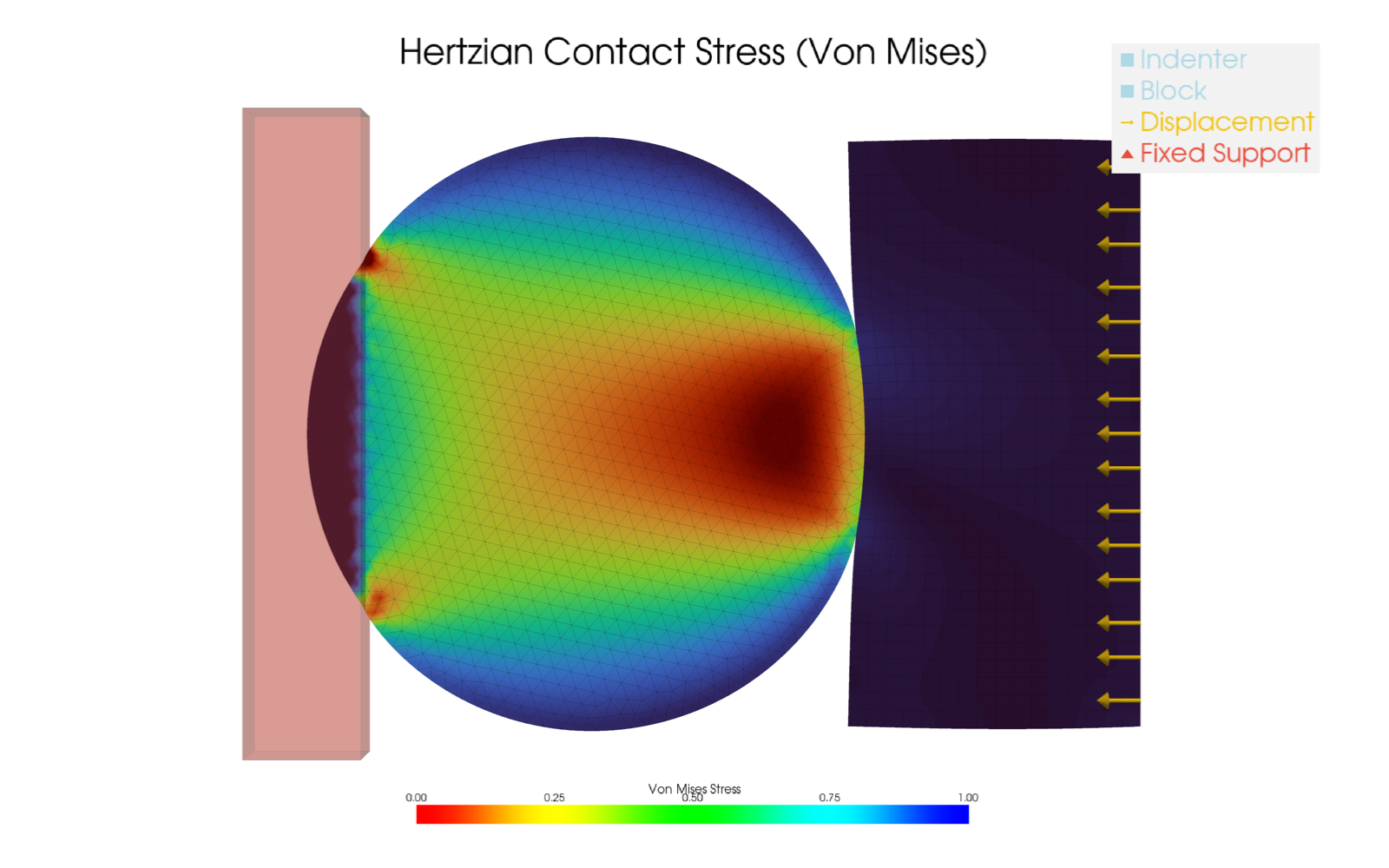
图 45 hertzian_contact.py 的输出:可变形压头(圆形)压向被位移的弹性体(右侧)时的冯·米塞斯应力场。应力集中在压头内部一个大致呈泪滴形的区域中,其中心略微位于接触斑内侧——这是经典的赫兹次表面应力分布。左侧固定壁和右侧弹性体上的规定位移箭头展示了边界设置。¶
运行示例¶
cd examples/solid/hertzian_contact
python hertzian_contact.py # writes hertzian_contact.png
控制台输出会报告接触压力分布和最大位移。
下一步¶
超弹性梁(新胡克) —— 单独呈现的能量最小化方法(不含接触)。
塑性(带各向同性硬化的 J2) —— 另一种非二次能量驱动(J2 塑性),仍以 L-BFGS 作为主力求解器。