Lid-Driven Cavity¶
The lid-driven cavity is the textbook benchmark for incompressible
Navier-Stokes solvers. The physics is simple — a box of fluid, the top
wall slides at unit speed, no-slip on the other walls, no body forces —
but at moderate Reynolds numbers it already exhibits a primary vortex
plus secondary corner eddies that any reasonable solver must reproduce.
Two scripts in examples/fluid/cavity/ run the steady-state problem at
\(\mathrm{Re} = 100\): cavity.py on a triangulated unit square
and cavity_3d.py on a tetrahedral unit cube. They share a single
dimension-generic NavierStokesAssembler, so the 3D case is
essentially a mesh swap.
Caution
TensorMesh does not yet natively support mixed-element function
spaces for coupled multi-physics — there is no built-in Taylor-Hood
(e.g. P2 velocity / P1 pressure) velocity-pressure pairing that would
satisfy the inf-sup (LBB) condition out of the box. These examples
therefore use equal-order P1-P1 for every field and recover
stability with SUPG/PSPG stabilization, which is why the weak form
below carries the extra residual-based tau terms. Native support
for mixed elements and tighter coupled-multiphysics workflows is on the
roadmap and will be added incrementally; until then, treat the
NavierStokesAssembler here as an example-grade pattern rather than a
stable library API.
Problem¶
The strong form of the steady incompressible Navier-Stokes equations is
with \(\Omega = (0, 1)^d\), \(\mu = 1/\mathrm{Re}\), \(\rho = 1\), and boundary conditions
top lid (\(y = 1\)): \(\mathbf{u} = (1, 0, \dots)\) (moving wall)
other walls: \(\mathbf{u} = \mathbf{0}\) (no-slip)
one node: \(p = 0\) (pressure pin to fix the null space).
Weak form and stabilization¶
The standard mixed weak form treats velocity and pressure together. Because the scripts use equal-order P1-P1 elements for both, the discrete LBB condition is violated and the naive Galerkin formulation has spurious pressure modes. The fix is SUPG/PSPG stabilization: add a residual-based perturbation to both the momentum and the continuity equations, scaled by a mesh-size-dependent parameter \(\tau\).
Denote by \(\mathbf{w} = \mathbf{w}^{n}\) the velocity at the previous Picard iterate. The SUPG/PSPG-stabilized weak form seeks \(\mathbf{u} \in (H^1_0(\Omega))^d + \mathbf{u}_b\) and \(p \in L^2(\Omega)/\mathbb{R}\) such that for all \(\mathbf{v} \in (H^1_0(\Omega))^d, q \in L^2(\Omega)/\mathbb{R}\),
Here, \(\mathbf{u}_b\) incorporates the non-homogeneous velocity boundary conditions; \(L^2(\Omega)/\mathbb{R}\) is the space modulo constants (since pressure is only determined up to an additive constant).
For equal-order P1-P1 this Galerkin form is unstable, so we append element-wise SUPG/PSPG terms built from the strong momentum residual
Note that the viscous term \(\mu\,\Delta\mathbf{u}\) vanishes on P1 elements. The stabilized discretization uses P1-P1 elements for \(\mathbf{u}\) and \(p\), and adds
to the aforementioned weak form, with \(\tau\) being a stabilization parameter.
The implementation is a custom
ElementAssembler defined locally in the example. Its
forward returns the \((d{+}1) \times (d{+}1)\) block coupling one
test node to one trial node — \(d\) velocity components plus pressure
— which the assembler stamps into a block-COO sparse matrix exactly as
the built-in vector-valued assemblers do. The block is built from four
named sub-blocks rather than entry-by-entry, so each physical term is
visible:
class NavierStokesAssembler(ElementAssembler):
def __post_init__(self, rho=1.0, mu=0.01, tau=0.1):
self.rho, self.mu, self.tau = rho, mu, tau
def forward(self, u, v, gradu, gradv, w_prev):
dim = gradu.shape[0]
eye = torch.eye(dim, dtype=gradu.dtype, device=gradu.device)
# velocity-velocity: convection + diffusion + SUPG (diagonal in components)
convection = self.rho * torch.dot(w_prev, gradv) * u
diffusion = self.mu * torch.dot(gradu, gradv)
supg = self.rho * torch.dot(w_prev, gradv) * self.tau * torch.dot(w_prev, gradu)
A_uu = (convection + diffusion + supg) * eye # [dim, dim]
# pressure gradient in momentum (+ PSPG); divergence in continuity (+ PSPG)
B_up = -v * gradu + self.tau * torch.dot(w_prev, gradu) * gradv # [dim]
B_pu = u * gradv + self.tau * self.rho * torch.dot(w_prev, gradv) * gradu # [dim]
C_pp = self.tau * torch.dot(gradv, gradu) # PSPG pressure Laplacian
top = torch.cat([A_uu, B_up.unsqueeze(1)], dim=1) # [dim, dim+1]
bottom = torch.cat([B_pu, C_pp.reshape(1)]).unsqueeze(0) # [1, dim+1]
return torch.cat([top, bottom], dim=0) # [dim+1, dim+1]
The four named sub-blocks map one-to-one onto the terms of the stabilized weak form above:
A_uu— convection \(\rho\,(\mathbf{w}\cdot\nabla)\mathbf{u}\cdot\mathbf{v}\), diffusion \(\mu\,\nabla\mathbf{u}:\nabla\mathbf{v}\), and the SUPG convection term \(\tau\,(\mathbf{w}\cdot\nabla\mathbf{v})\,\rho\,(\mathbf{w}\cdot\nabla)\mathbf{u}\) (diagonal in the components, hence* eye);B_up— pressure gradient \(-p\,\nabla\cdot\mathbf{v}\) and its SUPG counterpart \(\tau\,(\mathbf{w}\cdot\nabla\mathbf{v})\cdot\nabla p\);B_pu— divergence \(q\,\nabla\cdot\mathbf{u}\) and the PSPG convection term \(\tau\,\nabla q\cdot\rho\,(\mathbf{w}\cdot\nabla)\mathbf{u}\);C_pp— the PSPG pressure-Laplacian \(\tau\,\nabla p\cdot\nabla q\).
Because dim is read from gradu.shape[0], the same forward
produces a \(3{\times}3\) block in 2D and a \(4{\times}4\) block
in 3D with no changes.
Picard iteration¶
The convection term \((\mathbf{u}\cdot\nabla)\mathbf{u}\) is
linearized by passing the previous-iterate velocity
\(\mathbf{w}^{n}\) as w_prev to the assembler:
This converges geometrically for moderate Reynolds numbers; the script
iterates until ||u_new - u_full|| / ||u_new|| < 1e-4, typically ~8
iterations at Re=100.
assembler = NavierStokesAssembler.from_mesh(mesh, rho=rho, mu=mu, tau=tau)
condenser = Condenser(bc_mask, bc_val)
for i in range(max_iter):
w_prev = u_full.reshape(-1, n_dof)[:, :2] # previous velocity
K = assembler(points, point_data={"w_prev": w_prev})
f = torch.zeros(n_points * n_dof, dtype=torch.float64)
K_, f_ = condenser(K, f)
u_new = condenser.recover(K_.solve(f_))
diff = torch.norm(u_new - u_full) / (torch.norm(u_new) + 1e-8)
u_full = u_new
if diff < tol:
break
A few details that matter:
DOF layout. The unknowns are interleaved node-major:
[u_0, v_0, p_0, u_1, v_1, p_1, …]in 2D ([u, v, w, p]per node in 3D). The script’s smallcomponent_dofs(n_points, n_dof, comp)helper turns “componentcompat every node” into the flat global indices theCondensermask expects.Pressure pin.
bc_mask[n_dof - 1] = Trueclamps pressure to zero at node 0 — required because pressure is only determined up to an additive constant in incompressible flow.w_previs passed by name inpoint_dataand arrives inforwardas the matching keyword argument; see Forms for the dispatch contract.
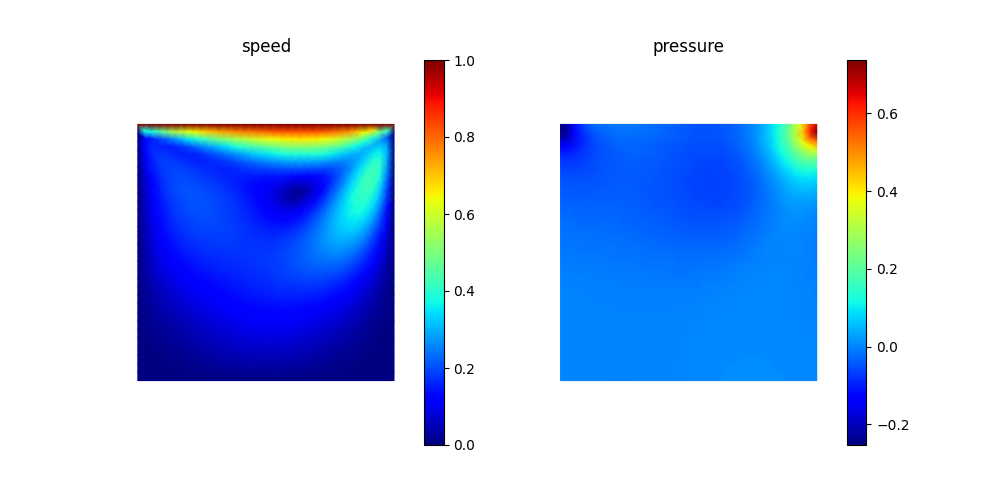
Fig. 49 Output of cavity.py at Re = 100. Left: speed magnitude
\(\|u\|\) — the moving lid drags fluid into the upper right,
sweeping it down the right wall and forming the primary vortex.
Right: pressure field, with the characteristic high-pressure spot in
the upper-right corner where the lid stagnates against the wall.¶
Going to 3D — cavity_3d.py¶
cavity_3d.py solves the same physics on a unit cube. Because the
NavierStokesAssembler is dimension-generic, the differences are
mechanical:
Mesh.gen_cube(chara_length=…)(tetrahedral) replacesMesh.gen_rectangle.The DOF layout is per-node
[u, v, w, p](n_dof = 4) instead of[u, v, p];w_prevnow slices the first three components.The output is volumetric:
cavity_3d.vtufor ParaView, plus a cross-section slice at \(z = 0.5\) rendered via PyVista ascavity_3d.png.
Everything else — the Picard loop, the SUPG/PSPG stamp, the pressure
pin, the use of Condenser — is unchanged:
mesh = Mesh.gen_cube(chara_length=chara_length).double()
n_dof = 4 # [u, v, w, p] per node
assembler = NavierStokesAssembler.from_mesh(mesh, rho=rho, mu=mu, tau=tau)
condenser = Condenser(bc_mask, bc_val)
for i in range(max_iter):
w_prev = u_full.reshape(-1, n_dof)[:, :3] # 3D velocity
K = assembler(mesh.points, point_data={"w_prev": w_prev})
f = torch.zeros(n_points * n_dof, dtype=torch.float64)
K_, f_ = condenser(K, f)
u_full = condenser.recover(K_.solve(f_))
The 4-DOFs-per-node layout makes the linear system large quickly — at
chara_length=0.05 it is on the order of a million unknowns — so a GPU
backend (backend="cudss" or "pytorch", see
Sparse Solvers) is recommended once you go beyond
a few thousand nodes.
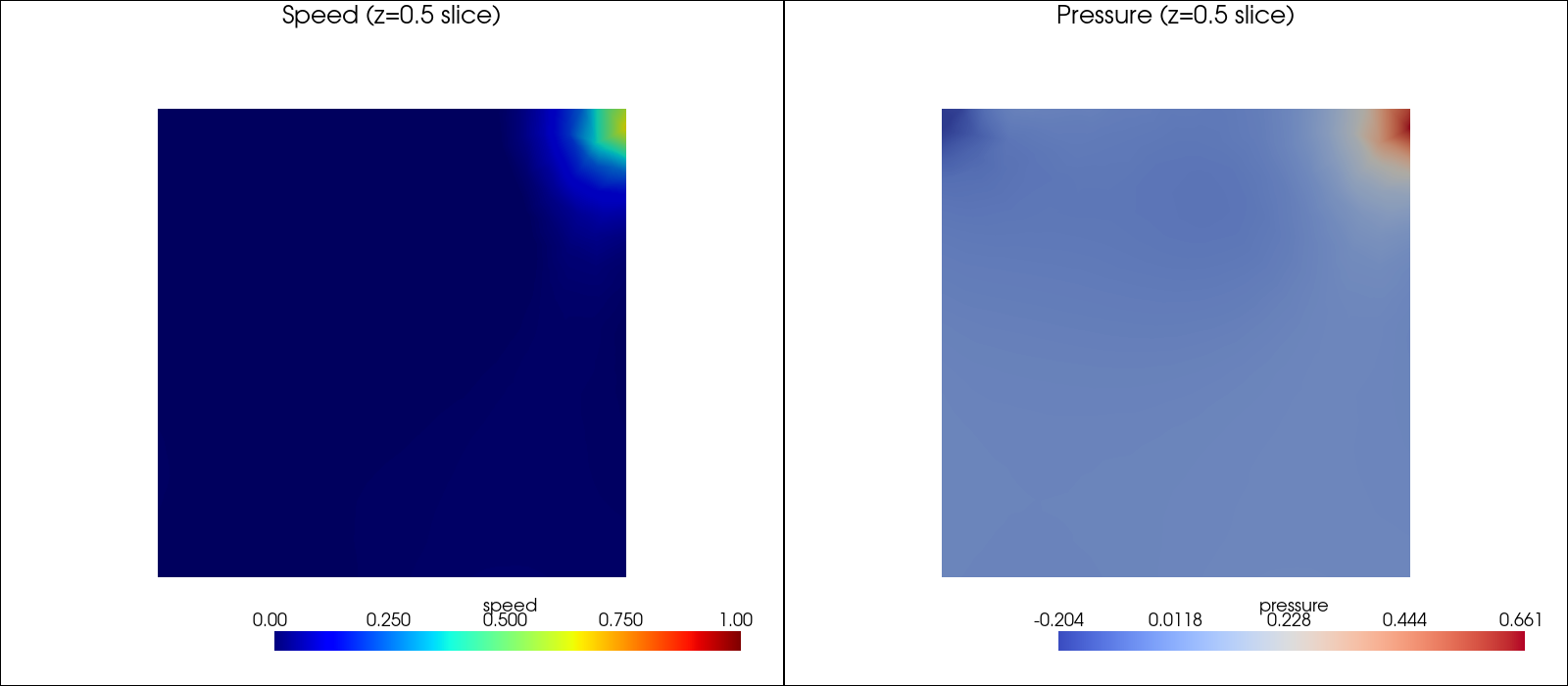
Fig. 50 Output of cavity_3d.py: speed magnitude (left) and pressure
(right) on the \(z=0.5\) mid-plane slice through the cube. The
flow pattern matches the 2D solution near the lid but decays toward
the front and back walls, so the mid-plane shows weaker recirculation
than the strict-2D case. Full 3D fields are written to
cavity_3d.vtu for ParaView.¶
Running it¶
cd examples/fluid/cavity
python cavity.py # 2D, writes cavity_results.png
python cavity_3d.py # 3D, writes cavity_3d.vtu and cavity_3d.png
The console reports the relative residual at each Picard step plus the
final convergence message. For 2D, compare the stream-function contours
qualitatively against the Ghia / Ghia / Shin reference (1982) for
Re=100 — the primary vortex center should match to within a few percent.
For 3D, open cavity_3d.vtu in ParaView for full volumetric inspection
(streamlines, iso-surfaces); the PNG is a quick sanity check.
What’s next¶
Cylinder Flow (Vortex Shedding) — adds transient time stepping.
Taylor-Green Vortex (Convergence Study) — the same family of assemblers, now used for a quantitative convergence study against an exact solution.
Forms — argument-dispatch contract for vector-valued
forwardreturns.Sparse Solvers — backend choice for the larger 3D systems.