Poisson Equation¶
Three scripts in examples/poisson/ walk the Poisson problem
through TensorMesh’s main features: a basic 2D solve, the same
solver in 3D, and h-adaptive refinement on an L-shaped domain
whose re-entrant corner produces a gradient singularity.
For batched right-hand sides over many source terms (the ML data-
generation pattern), see ML Datasets — that script lives under
examples/dataset/poisson/ so all batched-RHS workflows sit in
one place.
The strong form is:
with corresponding weak form
Every example below realizes this with LaplaceElementAssembler
for the stiffness, a NodeAssembler for the load,
and Condenser for the homogeneous Dirichlet BC.
The ground-truth source field comes from
PoissonMultiFrequency, which generates a
random truncated Fourier series whose analytical solution is also
available.
Basic 2D Poisson — poisson.py¶
The shortest end-to-end driver in the repo. The full pipeline fits in 25 lines:
import torch
from tensormesh import (LaplaceElementAssembler, Mesh,
Condenser, NodeAssembler)
from tensormesh.dataset import PoissonMultiFrequency
device = "cuda" if torch.cuda.is_available() else "cpu"
mesh = Mesh.gen_rectangle(chara_length=0.02).to(device=device)
assembler = LaplaceElementAssembler.from_mesh(mesh)
equation = PoissonMultiFrequency(K=16)
boundary_value = torch.zeros(mesh.boundary_mask.shape).to(device=device)
condenser = Condenser(mesh.boundary_mask, boundary_value)
f = equation.source_term(mesh.points, domain="rectangle")
K = assembler(mesh.points)
class FAssembler(NodeAssembler):
def forward(self, v, f):
return v * f
F_asm = FAssembler.from_mesh(mesh)
b = F_asm(mesh.points, point_data={"f": f})
K_, b_ = condenser(K, b)
u_ = K_.solve(b_, verbose=True)
u = condenser.recover(u_)
u_analytical = equation.solution(mesh.points)
mesh.plot({"f": f, "u_fem": u, "u_analytical": u_analytical},
save_path="poisson.png")
A few details worth pointing out:
assembler(mesh.points)returns aSparseMatrixbuilt from the gradient bilinear form. Pure-Python weak form, no custom kernels.FAssemblercarries the sourcefthrough the integrand by name (point_data={"f": f}becomes thefkwarg inforward(v, f)). See Forms for the full argument-dispatch contract.The
CondensershorthandK_, b_ = condenser(K, b)applies the Dirichlet boundary mask and folds prescribed values into the RHS.recover(...)glues the boundary values back on after the solve.K_.solve(b_)is inherited fromtorch-sla’sSparseTensor; it inspects the matrix and dispatches to the best available backend automatically. Passingverbose=Trueprints that decision, e.g.:[torch-sla] solve: n=2814, nnz=19300, dtype=float64, device=cuda, symmetric=True, spd=False, backend=cudss, method=ldltHere torch-sla detected a symmetric (but not SPD) system on CUDA and routed it through cuDSS with an \(LDL^{T}\) factorization. On CPU, or without cuDSS installed, it falls back to a different backend; the
backend=field always tells you which one ran.
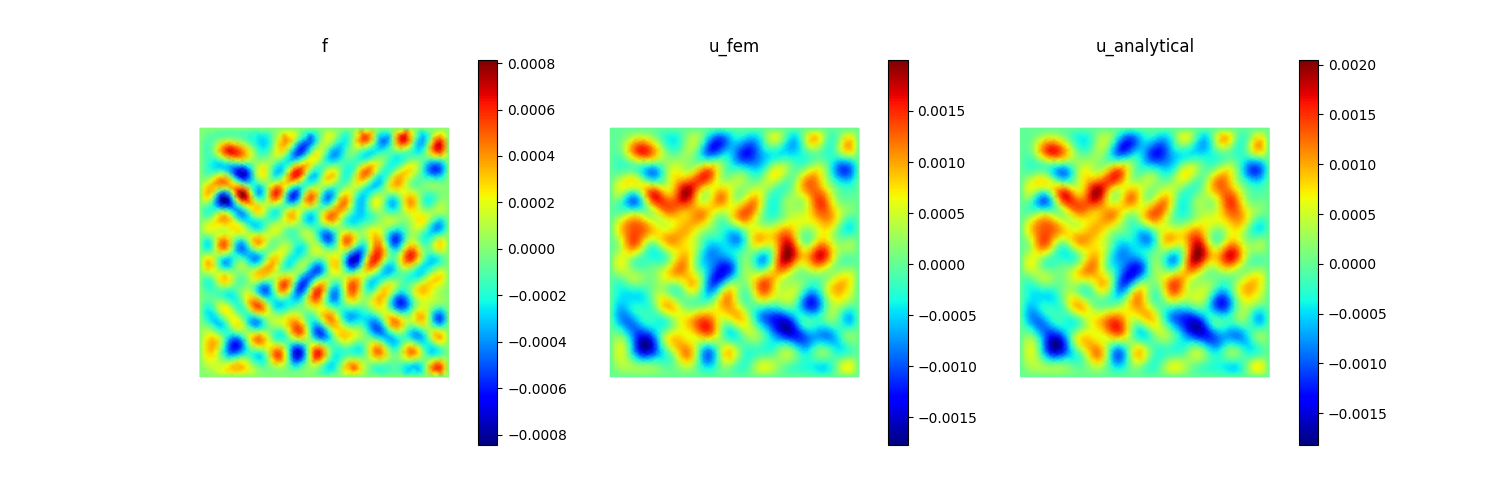
Fig. 38 Output of poisson.py: source f (left), FEM solution
u_fem (middle), and analytical reference u_analytical
(right) on the unit square. The two solution panels are visually
indistinguishable at this resolution — exactly what you want
from a converged mesh.¶
3D extension — poisson_3d.py¶
Identical machinery, swapping in a tetrahedral cube:
mesh = Mesh.gen_cube(chara_length=0.05, element_type="tet")
K = LaplaceElementAssembler.from_mesh(mesh)()
The same LaplaceElementAssembler works because
∇u·∇v is dimension-generic — the integrand has no hard-coded
spatial dimension. The output is written as poisson_3d.vtu for
opening in ParaView; the script also produces a half-domain cutaway
PNG for quick inspection.
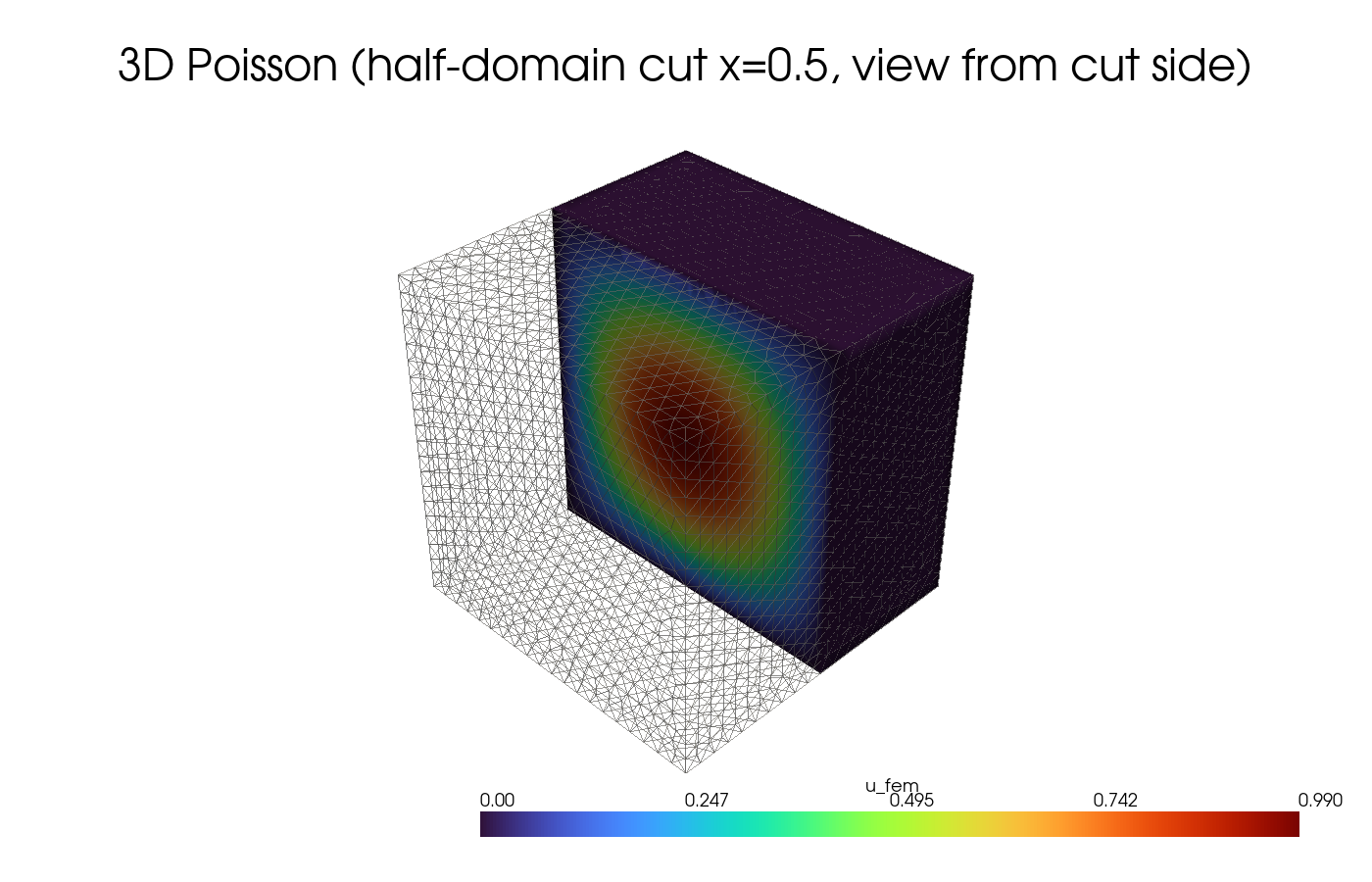
Fig. 39 Output of poisson_3d.py: half-domain cut at \(x=0.5\)
showing the FEM solution on the unit cube. The reported
mass-weighted relative \(L^2\) error against the analytical
Fourier solution is \(\mathrm{rel\_L2} = 1.059\times10^{-2}\)
at chara_length=0.05.¶
h-adaptive refinement on the L-shape — poisson_h_adaptivity.py¶
This is the one example on this page that goes well beyond the weak form. The L-shaped domain has a re-entrant corner at \((0.5, 0.5)\), where the exact solution \(u = r^{2/3}\sin(2\theta/3)\) has a gradient singularity. Uniform h-refinement converges slowly because the global error is dominated by the corner singularity.
The script implements the classical solve -> estimate -> mark ->
remesh loop. For P1 triangles, u_fem is affine on each element, so
\(\Delta u_h = 0\) inside every element for this Laplace problem.
The residual estimator therefore comes from jumps of the normal
gradient across interior edges:
On a straight P1 edge the jump is constant, and the implementation
uses the equivalent form
\(\sum_e |e|^2 [[\nabla u_h \cdot n_e]]^2\). TensorMesh supplies
the element gradients via Transformation and the
interior-neighbor pairs via mesh.element_adjacency("triangle").
mesh = Mesh.gen_L(chara_length=0.08, element_type="tri")
for level in range(max_levels):
u_fem = solve_laplace(mesh)
u_exact = singular_solution(mesh.points)
rel_err = global_l2_error(mesh, u_fem, u_exact)
if rel_err < target_error:
break
centroids, eta, h = element_error_and_sizes(mesh, u_fem)
h_new = doerfler_sizes(h, eta, theta=0.5) # halve where eta > theta*max(eta)
mesh = remesh_L(centroids, h_new) # gmsh remesh
Three pieces are worth a closer look:
Non-homogeneous Dirichlet BC. The exact solution is non-zero on the boundary, so the script builds a
Condenserwithdirichlet_value=gevaluated from the singular formula at every boundary node. Static condensation folds the boundary values into the RHS; see Boundary Conditions.Mass-weighted reporting error.
MassElementAssemblerprovides the \(L^2\) norm operator:e^T M e. The relative error divides by \(\sqrt{u_\text{exact}^T M u_\text{exact}}\) for scale invariance. This diagnostic uses the manufactured singular solution only to measure convergence; it does not drive refinement.Dörfler marking. Mark every element whose error indicator exceeds \(\theta\, \max(\eta)\) (default \(\theta=0.5\)) and halve its size; coarsen the (almost-)error-free elements. The new size field is fed to
gmsh.model.mesh.setSizeCallback, and the L-shape geometry is re-meshed via OpenCASCADE booleans.
Note
The remesh step calls into gmsh directly via the Python API
and requires gmsh >= 4.8 for setSizeCallback. Install
with pip install gmsh.
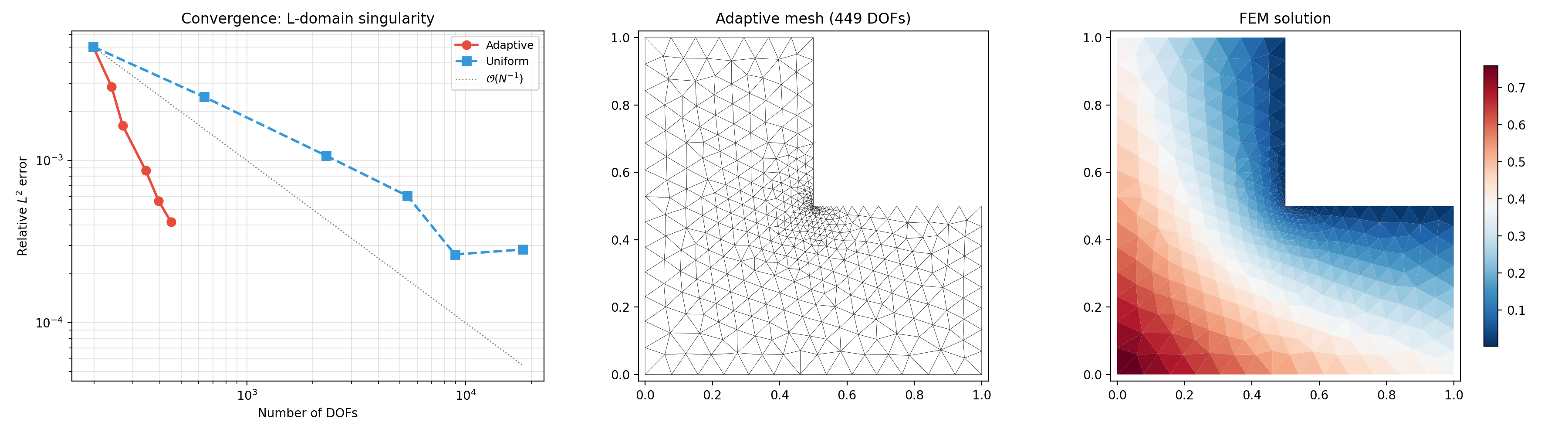
Fig. 40 Output of poisson_h_adaptivity.py regenerated with the
normal-gradient-jump estimator. Left: relative
\(L^2\) error vs DOF count. Middle: the final adaptive
mesh with elements clustered at the re-entrant corner.
Right: the FEM solution itself.¶
Running the examples¶
cd examples/poisson
python poisson.py # 2D, writes poisson.png
python poisson_3d.py # 3D, writes poisson_3d.vtu
python poisson_h_adaptivity.py # writes poisson_h_adaptivity.png
What’s next¶
Forms — the assembler base classes and the
forwardargument-dispatch contract used in every script above.Boundary Conditions — non-homogeneous Dirichlet via
dirichlet_value(used in the L-shape adaptive example).ML Datasets — batched right-hand sides over many source terms, the natural ML data-generation extension of the basic 2D solve.
Diffusion — same machinery, plus time stepping.