Inverse Design & Identification¶
TensorMesh is differentiable end to end: every step of
Mesh → Assembler → SparseMatrix → Condenser → Solve is an
nn.Module or a custom autograd.Function, and the linear solve
carries an analytic adjoint backward (inherited from torch-sla).
A loss computed on the FEM solution can therefore be back-propagated to
anything upstream — a coefficient at every node, a per-element design
density, a source term — without writing a single sensitivity equation
by hand. The Differentiability chapter covers the
mechanics; this gallery turns it into three runnable scripts in
examples/inverse_design/.
They span the two flavours of “gradient through the PDE”:
Identification — recover an unknown field from observations (
coefficient_identification.py).Design — choose a field that optimises an objective under constraints (
thermal_topology.pyandcompliance_topology.py).
Note
All three obtain their gradients purely from autograd. None of
them implements an adjoint by hand — that is the whole point. The
classical SIMP sensitivity
\(\partial C/\partial \rho_e = -p\,\rho_e^{p-1}(E_{\max}-E_{\min})\,
\mathbf{u}_e^{T}\mathbf{K}_0^e\mathbf{u}_e\) falls out of
compliance.backward() automatically.
Coefficient-field identification — coefficient_identification.py¶
Recover an unknown, spatially varying diffusion coefficient \(\kappa(x)\) in
from a single observed solution \(u_{\rm obs}\). The forward map is “FEM-solve given \(\kappa\)”; the loss is the L² distance to the observation; Adam descends it. We parametrise \(\kappa = 1 + \tanh\theta\) so \(\kappa\in(0,2)\) stays strictly positive (the matrix is SPD every iteration) with \(\theta\) unconstrained.
class WeightedLaplace(ElementAssembler):
def forward(self, gradu, gradv, kappa):
return kappa * (gradu @ gradv)
def fem_solve(kappa):
K = WeightedLaplace.from_mesh(mesh)(point_data={"kappa": kappa}).double()
b = Source.from_mesh(mesh)(point_data={"f": f_vals}).double()
K_, b_ = cond(K, b)
return cond.recover(K_.solve(b_))
theta = torch.zeros(mesh.n_points, requires_grad=True) # kappa = 1 + tanh(theta)
optim = torch.optim.Adam([theta], lr=3e-2)
for step in range(5000):
optim.zero_grad()
u = fem_solve(1.0 + torch.tanh(theta))
loss = ((u - u_obs) ** 2).sum()
loss.backward() # adjoint solve gives dLoss/dtheta
optim.step()
Over 5000 steps the data loss falls by more than seven orders of magnitude and the recovered field matches the four-lobe ground truth almost everywhere:
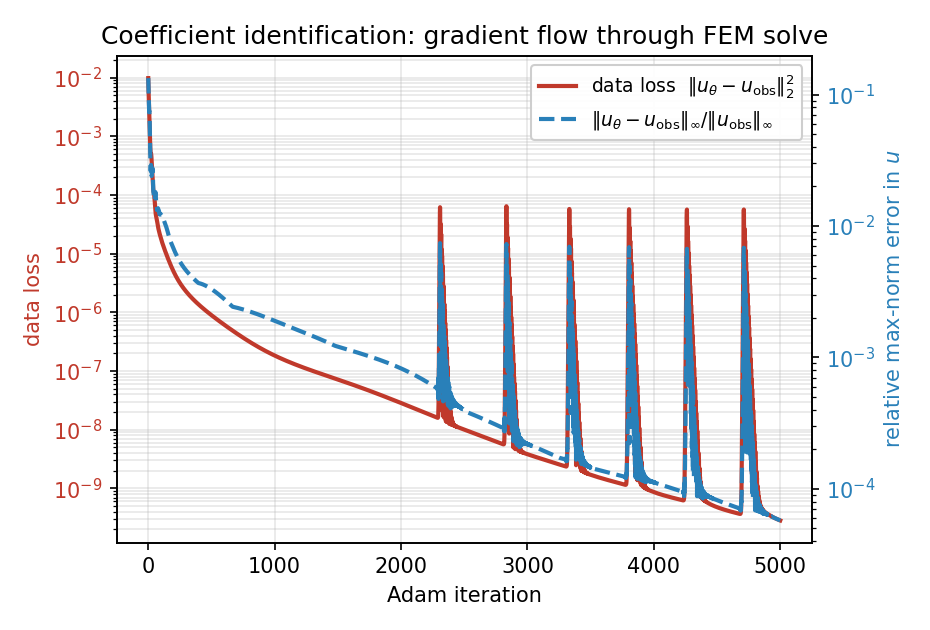
Fig. 55 Optimisation history: the data loss \(\|u_\theta - u_{\rm obs}\|_2^2\) drops to \(\sim 3\times10^{-10}\) (the periodic spikes are Adam overshooting in the ill-conditioned valley, recovered within a few steps); the relative max-norm error in \(u\) reaches \(\sim 6\times10^{-5}\).¶
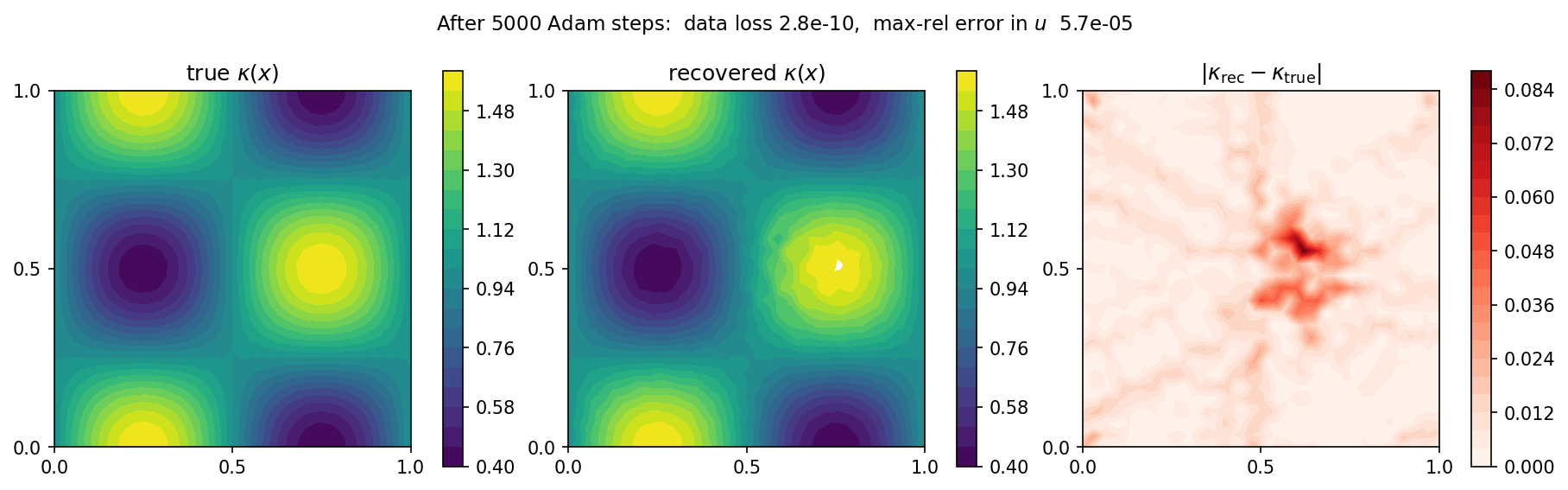
Fig. 56 True (left), recovered (middle), and absolute-error (right) coefficient fields. The only visible residual is a faint blob at the centre, where the constant source makes \(\nabla u\) vanish: with no flux there the data barely constrains \(\kappa\), so that region is recovered slowest. A smoothness penalty on \(\theta\) removes it.¶
Thermal-compliance topology optimization — thermal_topology.py¶
Distribute a fixed amount of conductive material on the unit square so as to drain heat from a central source to the cold boundary as efficiently as possible — minimise the thermal compliance \(J = \mathbf{b}^{T}\mathbf{u}\) under a hard volume cap:
with a SIMP conductivity law
\(\kappa(\rho)=\kappa_{\min}+(1-\kappa_{\min})\,\rho^{p}\) and a
per-element density \(\rho\). The compliance gradient comes from
autograd; the density update is the built-in
OCOptimizer (Optimality Criteria with a
volume-bisection step).
from tensormesh.optimizer import OCOptimizer
rho = torch.full((n_elem,), V, requires_grad=True)
optim = OCOptimizer(rho, vf=V, move_limit=0.15)
def fem_solve(rho):
kappa = kmin + (1.0 - kmin) * rho ** p_simp # SIMP, per element
K = SIMPLaplace.from_mesh(mesh)(element_data={"kappa": kappa}).double()
b = Source.from_mesh(mesh)(point_data={"f": f_field}).double()
K_, b_ = cond(K, b)
return cond.recover(K_.solve(b_)), b
for step in range(60):
optim.zero_grad()
u, b = fem_solve(rho)
compliance = (b * u).sum() # J = b^T u
compliance.backward() # autograd populates rho.grad
optim.step() # OC update + volume bisection
The optimal layout is a “thermal cross” connecting the hot centre to the four cold mid-edges; compliance drops about \(8.6\times\) (\(5.9\times10^{-3} \to 6.9\times10^{-4}\)) while the volume fraction is held at \(0.4\) exactly:
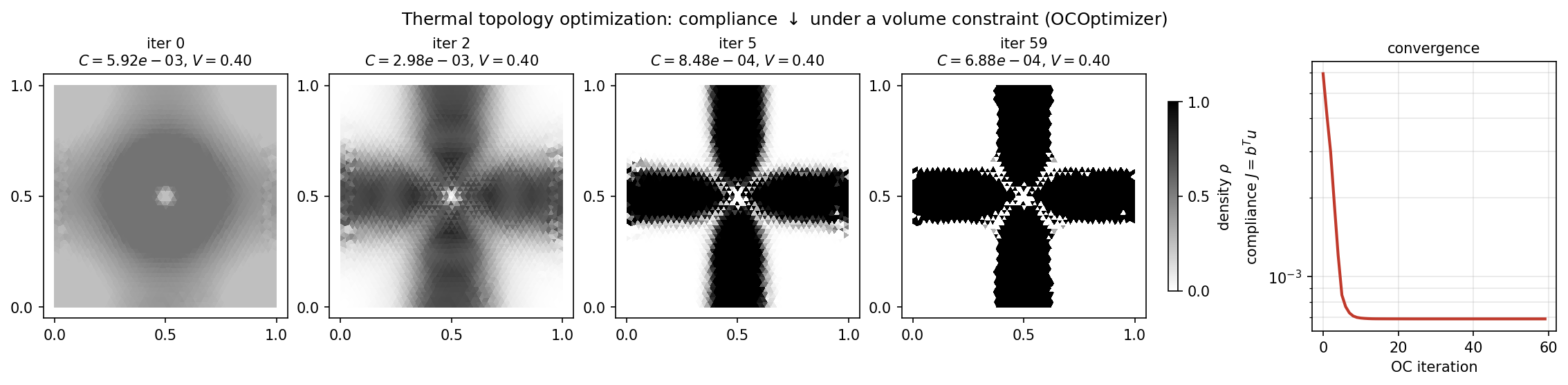
Fig. 57 Density evolution over 60 OC steps (iteration 0 is the uniform \(\rho = V\) start) and the compliance history. The cross has emerged by iteration 5 and sharpens into a near 0/1 design by the end.¶
This is the scalar/heat counterpart of the structural problem below: identical “autograd sensitivity + density update” pattern, different physics and a different optimiser.
Structural compliance topology optimization — compliance_topology.py¶
The classical 2D cantilever: minimise structural compliance under a volume constraint, SIMP density interpolation, MMA (Method of Moving Asymptotes) updates with a density filter. It is set up to match a JAX-FEM reference problem for a head-to-head comparison.
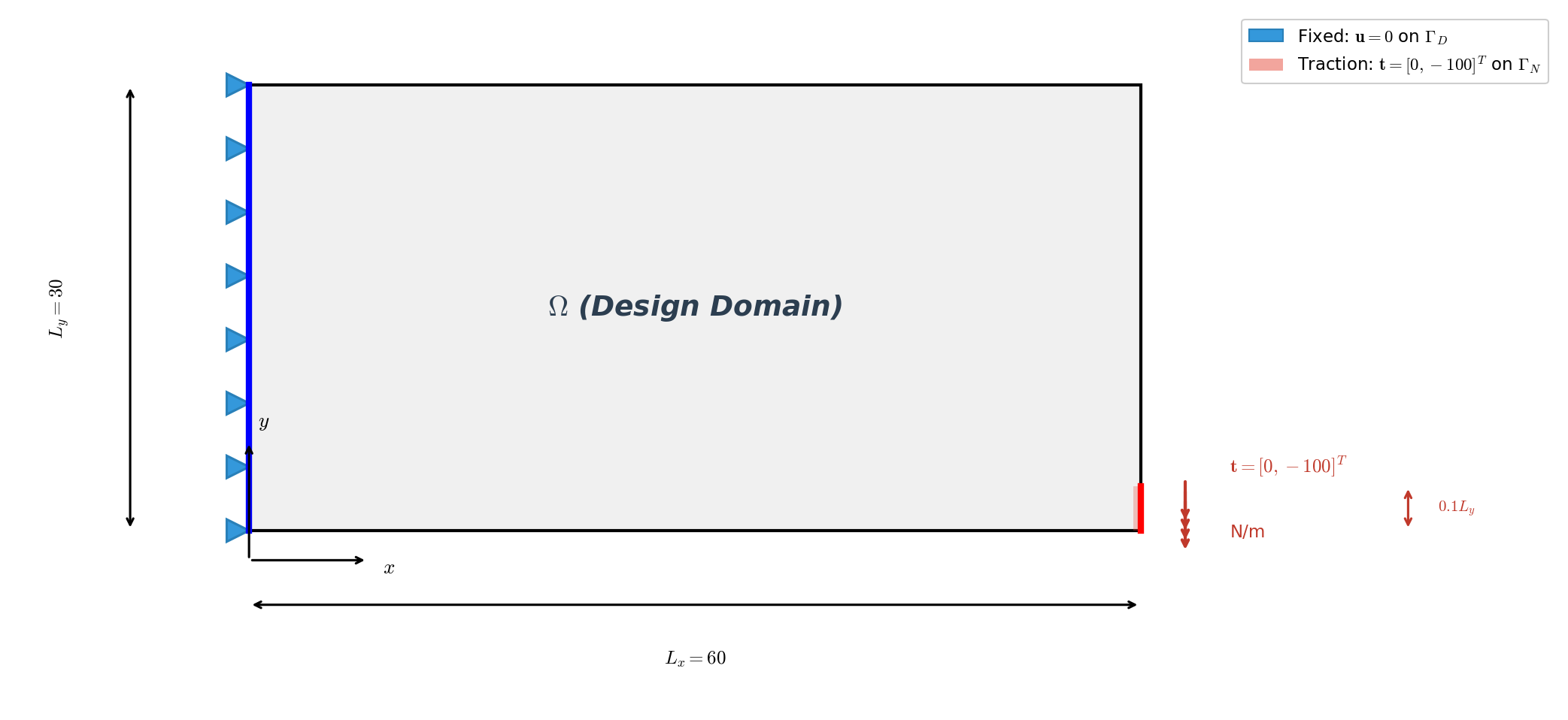
Setup. Domain \(60\times30\) with \(60\times30\) QUAD4 elements (1891 nodes, 1800 elements); left edge clamped (\(\mathbf{u}=\mathbf{0}\) at \(x=0\)); a downward traction \(\mathbf{t}=[0,-100]^{T}\) on the bottom-right corner; plane-stress material with \(E_{\max}=70\,000\), \(E_{\min}=70\), \(\nu=0.3\), SIMP penalty \(p=3\), target volume fraction \(\bar v = 0.5\).
The plane-stress stiffness integrand is written directly in the
assembler’s forward; rho enters per element via
element_data, and the compliance gradient is again just
compliance.backward():
class SIMPStiffnessAssembler(ElementAssembler):
def __post_init__(self, E_max=70e3, E_min=70.0, nu=0.3, penal=3.0):
self.E_max, self.E_min, self.nu, self.penal = E_max, E_min, nu, penal
def forward(self, gradu, gradv, rho):
E = self.E_min + rho ** self.penal * (self.E_max - self.E_min)
D11, D12 = E / (1 - self.nu**2), self.nu * E / (1 - self.nu**2)
D33 = E / (2 * (1 + self.nu))
gux, guy = gradu[0], gradu[1]
gvx, gvy = gradv[0], gradv[1]
K00 = D11 * gux * gvx + D33 * guy * gvy
K01 = D12 * gux * gvy + D33 * guy * gvx
K10 = D12 * guy * gvx + D33 * gux * gvy
K11 = D11 * guy * gvy + D33 * gux * gvx
return torch.stack([torch.stack([K00, K01]), torch.stack([K10, K11])])
for epoch in range(max_iters):
rho_var = rho.clone().requires_grad_(True)
K = K_asm(mesh.points, element_data={"rho": rho_var})
K_, F_ = condenser(K, F)
u = condenser.recover(K_.solve(F_, backend="scipy"))
compliance = u @ F
compliance.backward() # dC/drho via autograd
optimizer.step(dc=rho_var.grad, dv=torch.ones_like(rho) / n_elem)
The optimizer converges to the canonical cantilever truss, tracking the JAX-FEM reference closely:
Iter |
JAX-FEM |
TensorMesh |
|---|---|---|
0 |
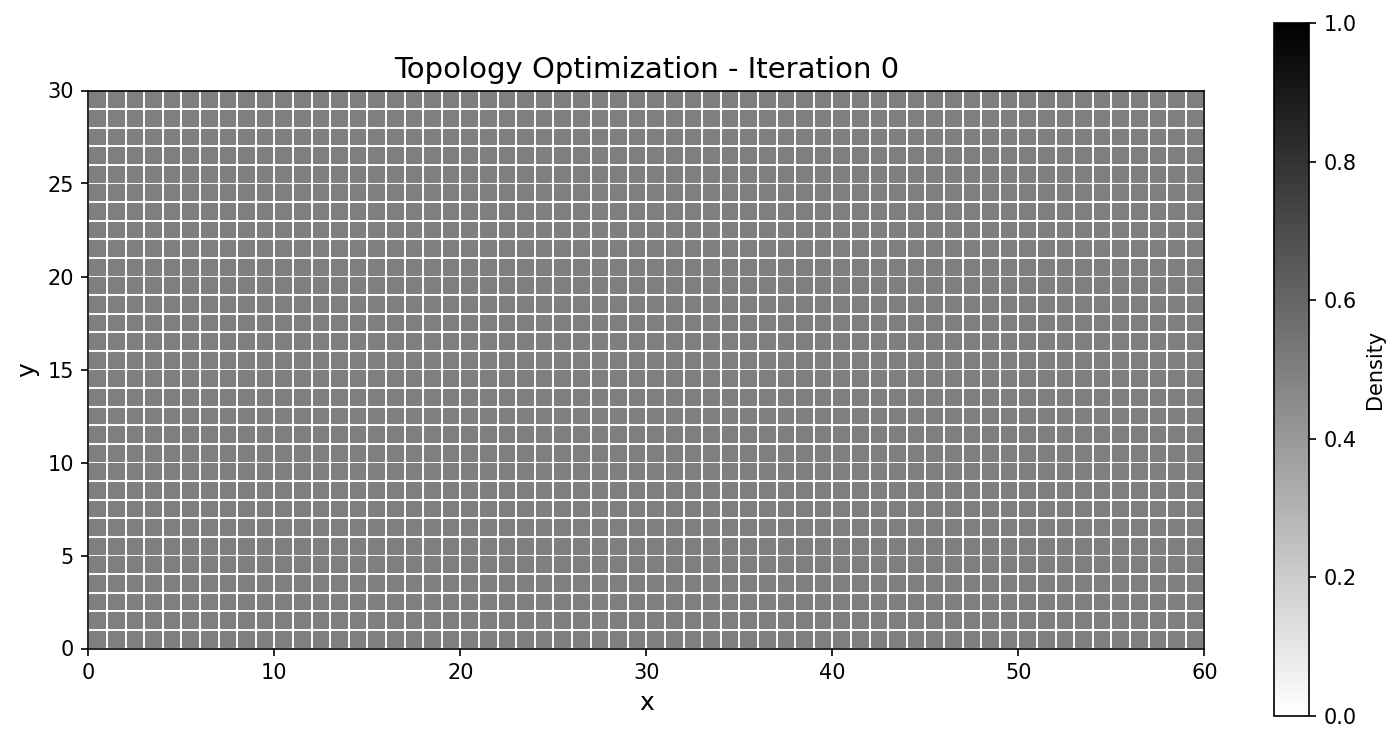
|
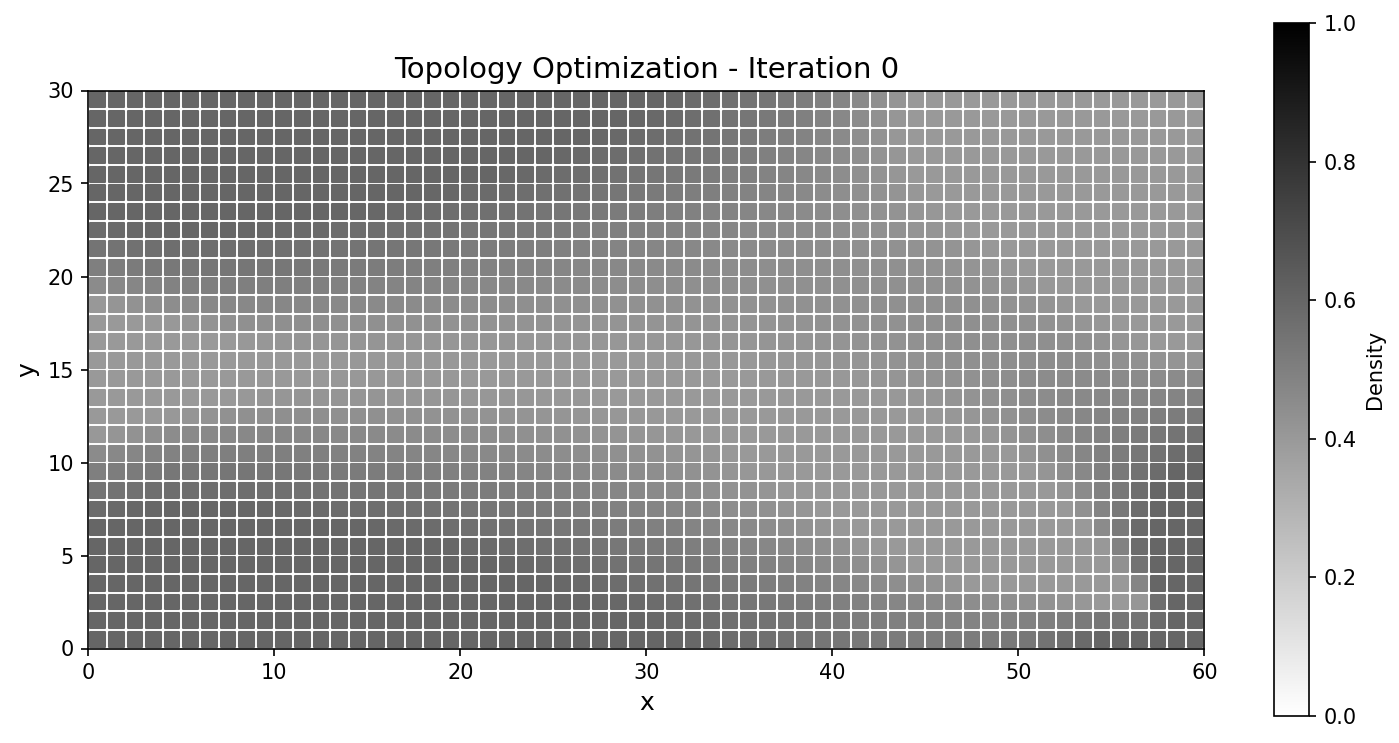
|
10 |
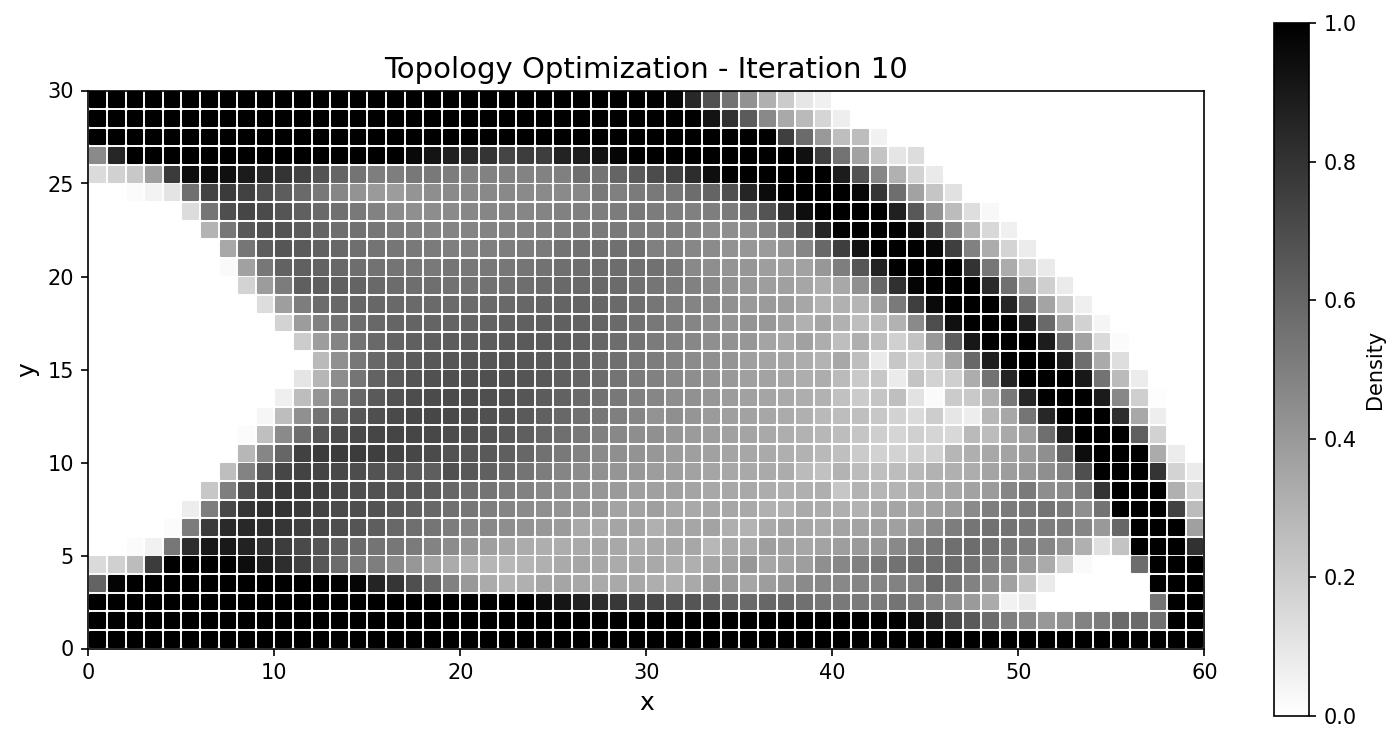
|
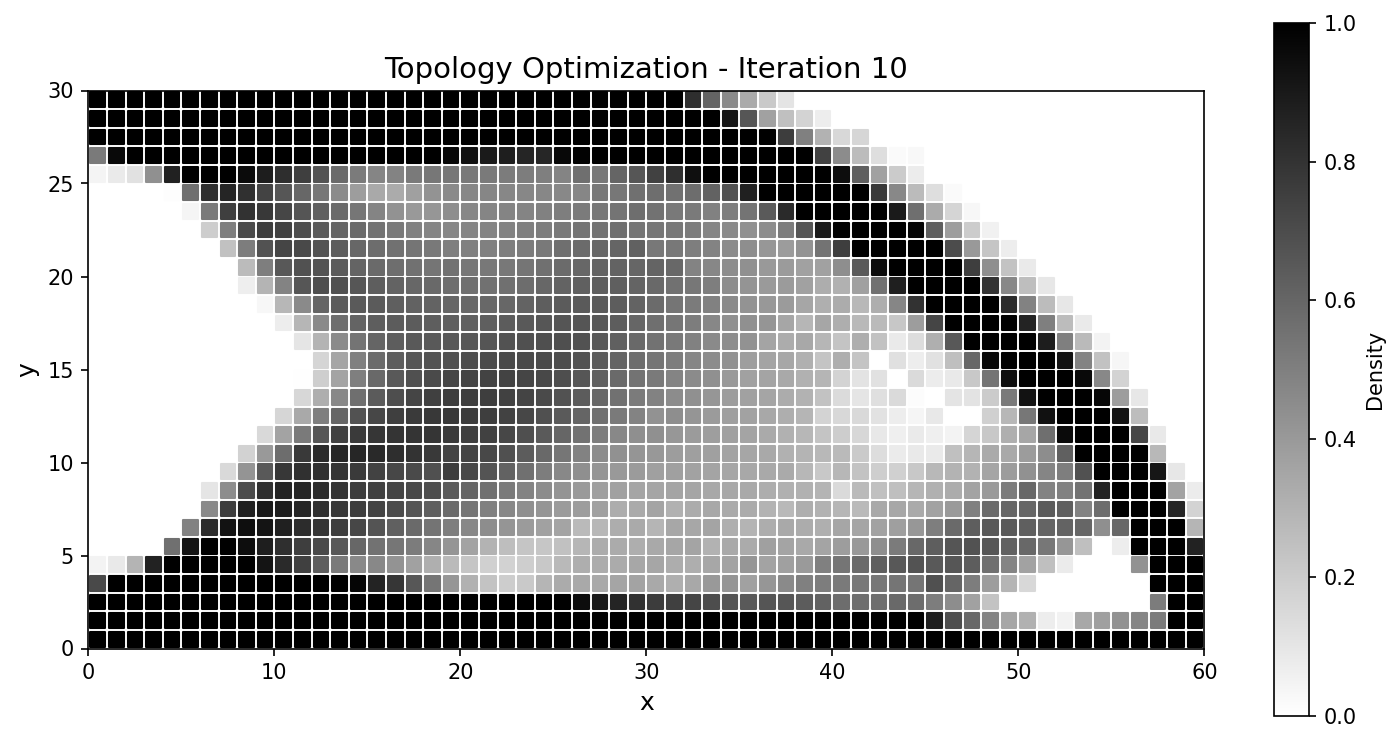
|
25 |
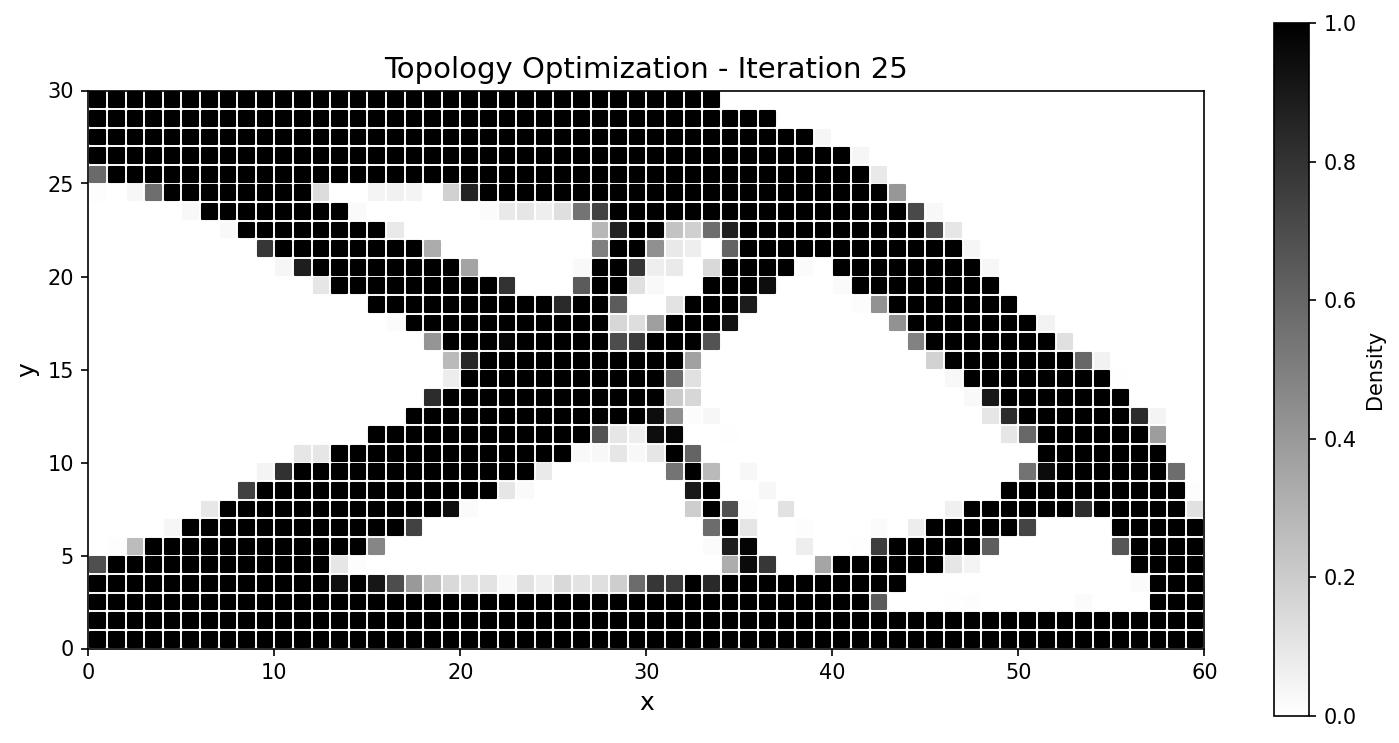
|
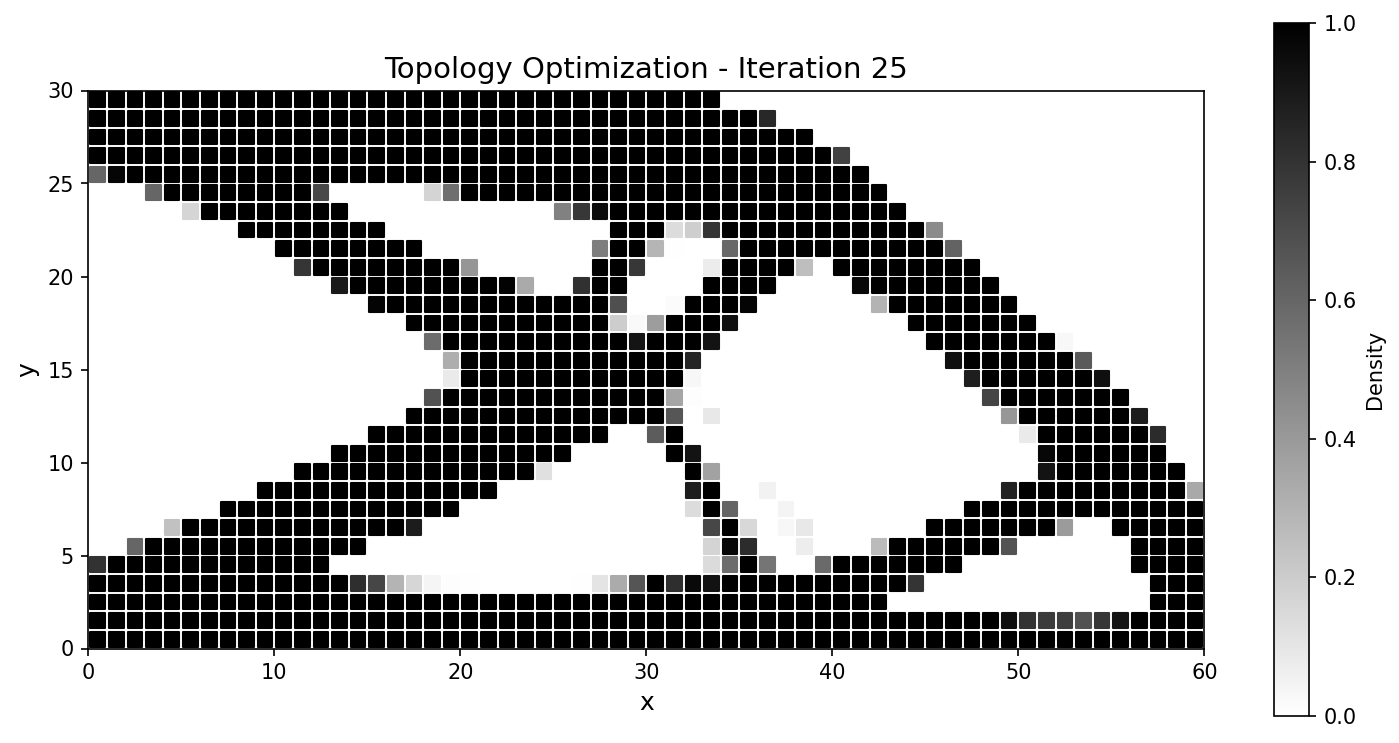
|
50 |
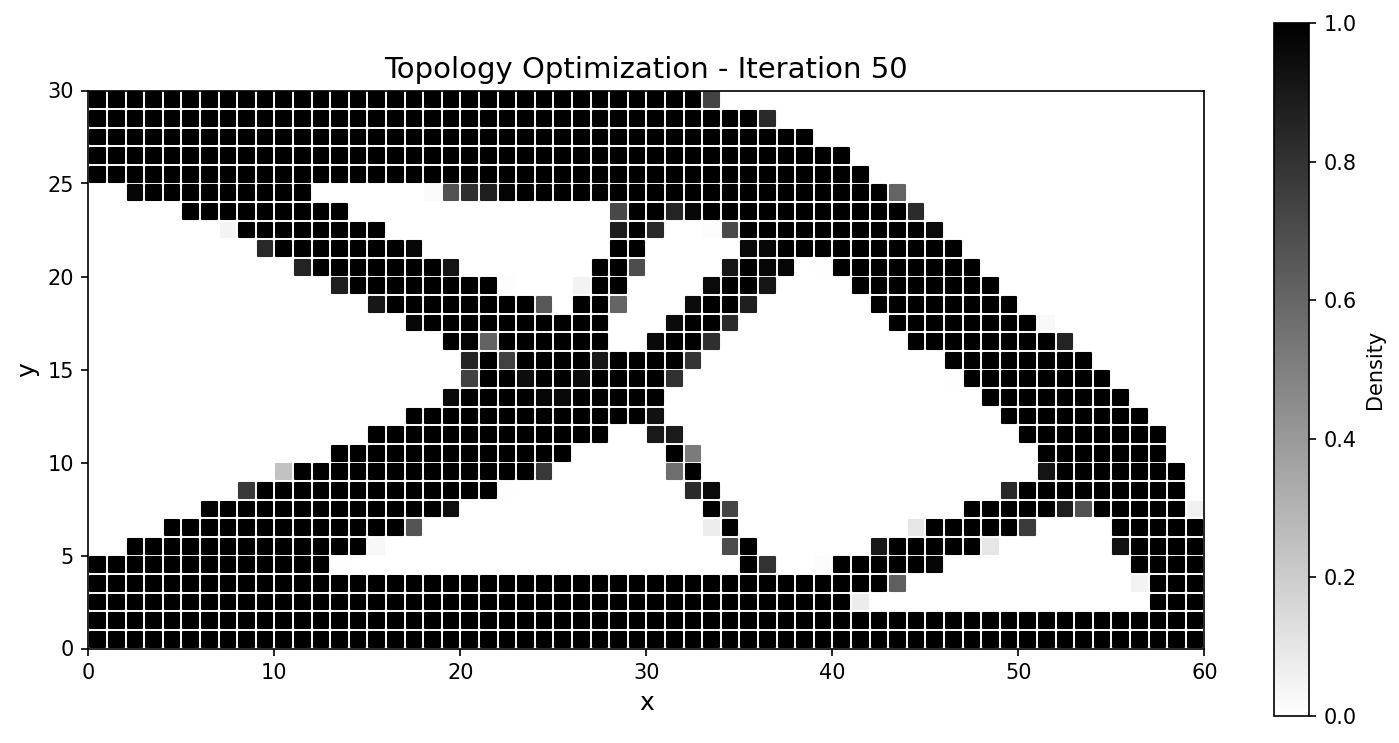
|
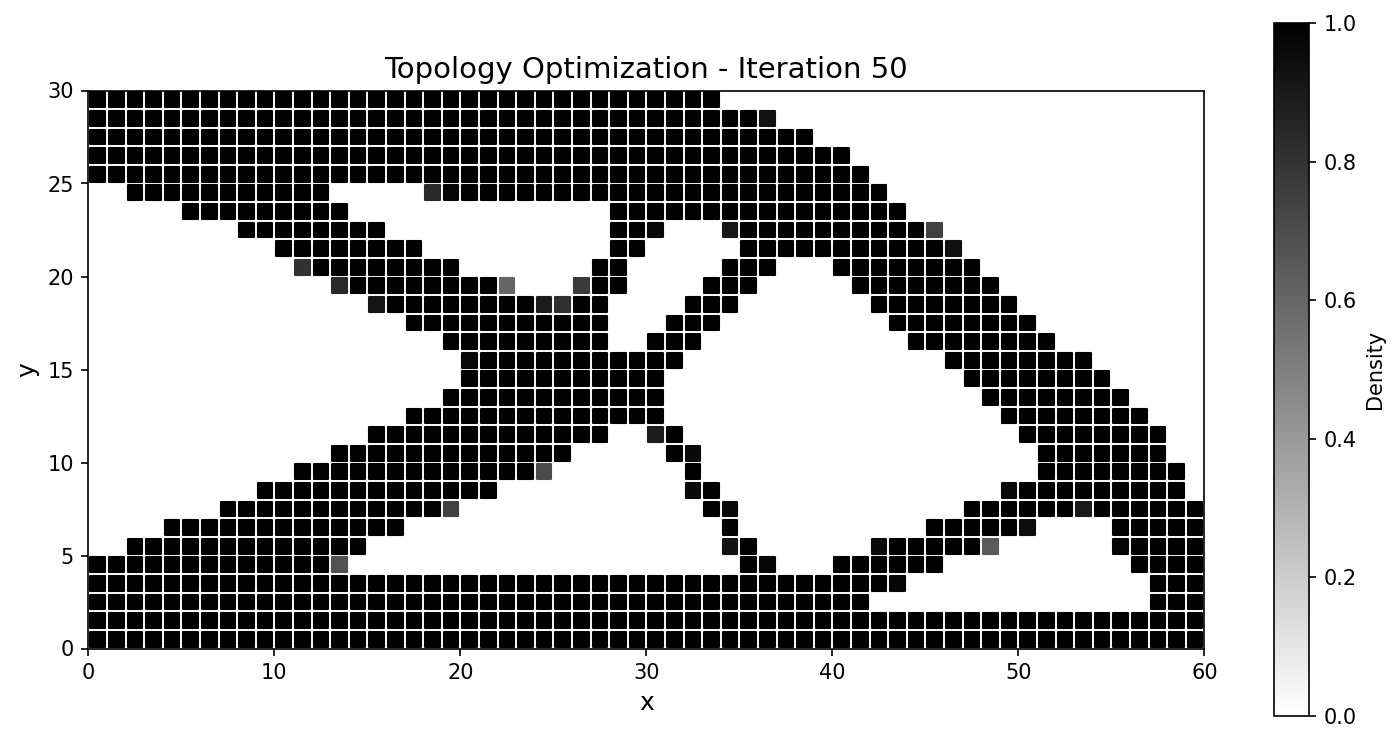
|
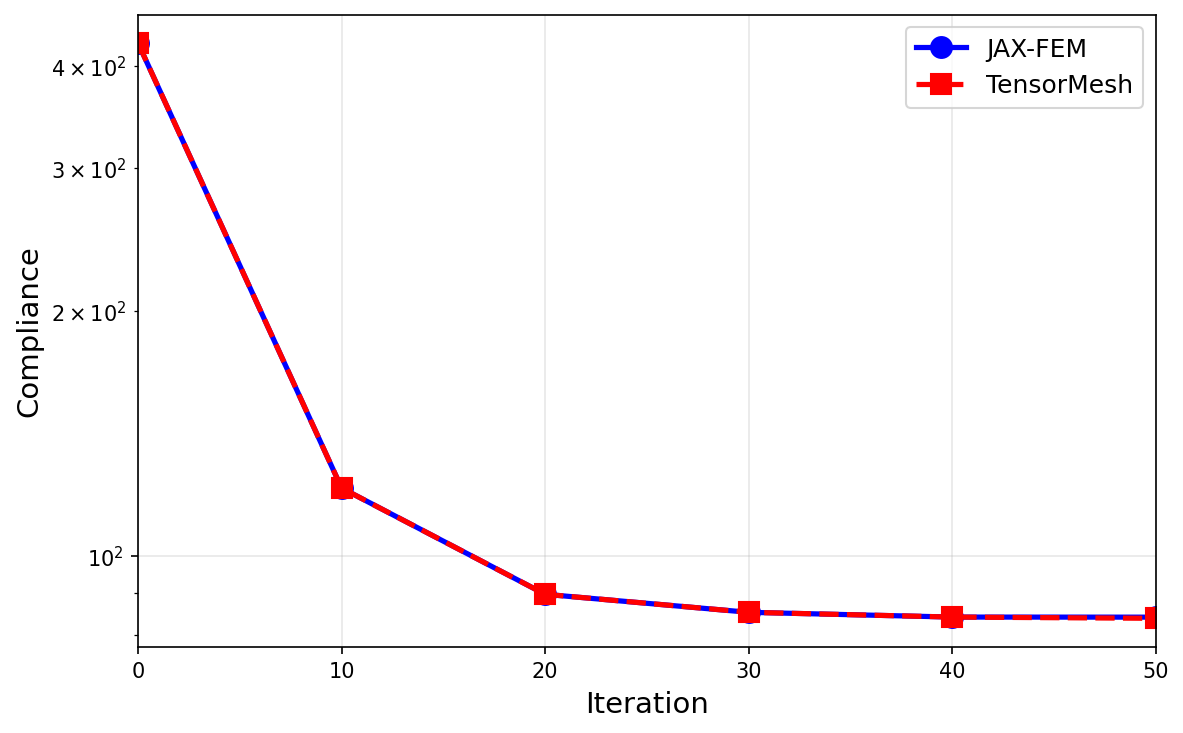
Fig. 58 Compliance histories agree across the run; the final designs match to a fraction of a percent.¶
Metric |
JAX-FEM |
TensorMesh |
Note |
|---|---|---|---|
Final compliance |
84.03 |
83.75 |
0.33 % difference |
Volume fraction |
0.500 |
0.500 |
matched |
Total time |
31.13 s |
8.35 s |
3.7× faster |
Note
This example depends on the local mma_optimizer.py (a small MMA
implementation) and on meshio / tqdm for VTK export and the
progress bar. The lighter thermal_topology.py above uses the
built-in OCOptimizer and has no extra
dependencies.
Running the examples¶
cd examples/inverse_design
python coefficient_identification.py # ~1 min CPU -> coefficient_id_*.png
python thermal_topology.py # a few seconds -> thermal_topology.png
python compliance_topology.py # cantilever; writes output/
Each accepts --device cuda and a few problem-size flags
(--n-iter, --chara-length, --vf); pass -h for the list.
What’s next¶
Differentiability — the adjoint backward, the full cost/correctness story, and how to wire a neural network into any of these loops.
Sparse Solvers — the autograd-aware
SparseMatrix.solveandnonlinear_solvebehind every solve here.ML Datasets — batched forward solves for ML training data, the other side of differentiable FEM.