Benchmark¶
This page compares TensorMesh against several established FEM frameworks on two forward problems (3D Poisson and 3D linear elasticity) and one inverse problem (compliance-minimization topology optimization).
All benchmark scripts and reference data live in a separate repository: camlab-ethz/tensormesh-bench.
Test environment¶
CPU |
8 cores from a dual-socket AMD EPYC 9005-series (Zen 5 “Turin”) node |
GPU |
1× NVIDIA RTX PRO 6000 Blackwell Server Edition |
Memory |
64 GB DDR5 ECC (8 cores × 8 GB) |
OS |
Ubuntu 22.04 LTS (x86_64) |
Compared frameworks¶
Framework |
Backend |
CPU |
CUDA |
Notes |
|---|---|---|---|---|
C++/Python |
✅ |
❌ |
8-rank MPI |
|
Python/PETSc |
✅ |
❌ |
8-rank MPI |
|
C++ |
✅ |
❌ |
8-rank MPI |
|
Python |
✅ |
❌ |
Lightweight, single process |
|
JAX |
✅ |
✅ |
Differentiable |
|
PyTorch |
✅ |
✅ |
Differentiable |
|
TensorMesh |
PyTorch |
✅ |
✅ |
Differentiable |
Solver configuration¶
To keep the comparison controlled, every framework uses the same iterative linear solver and stopping criteria:
Parameter |
Value |
|---|---|
Iterative method |
BiCGSTAB |
Preconditioner |
Jacobi (diagonal scaling) |
Relative tolerance |
\(10^{-10}\) |
Absolute tolerance |
\(10^{-10}\) |
Maximum iterations |
10,000 |
Note
The only exception is the CUDA path of torch-fem, which uses conjugate gradient (CG) instead of BiCGSTAB — its CUDA backend does not ship a BiCGSTAB implementation.
Forward problems¶
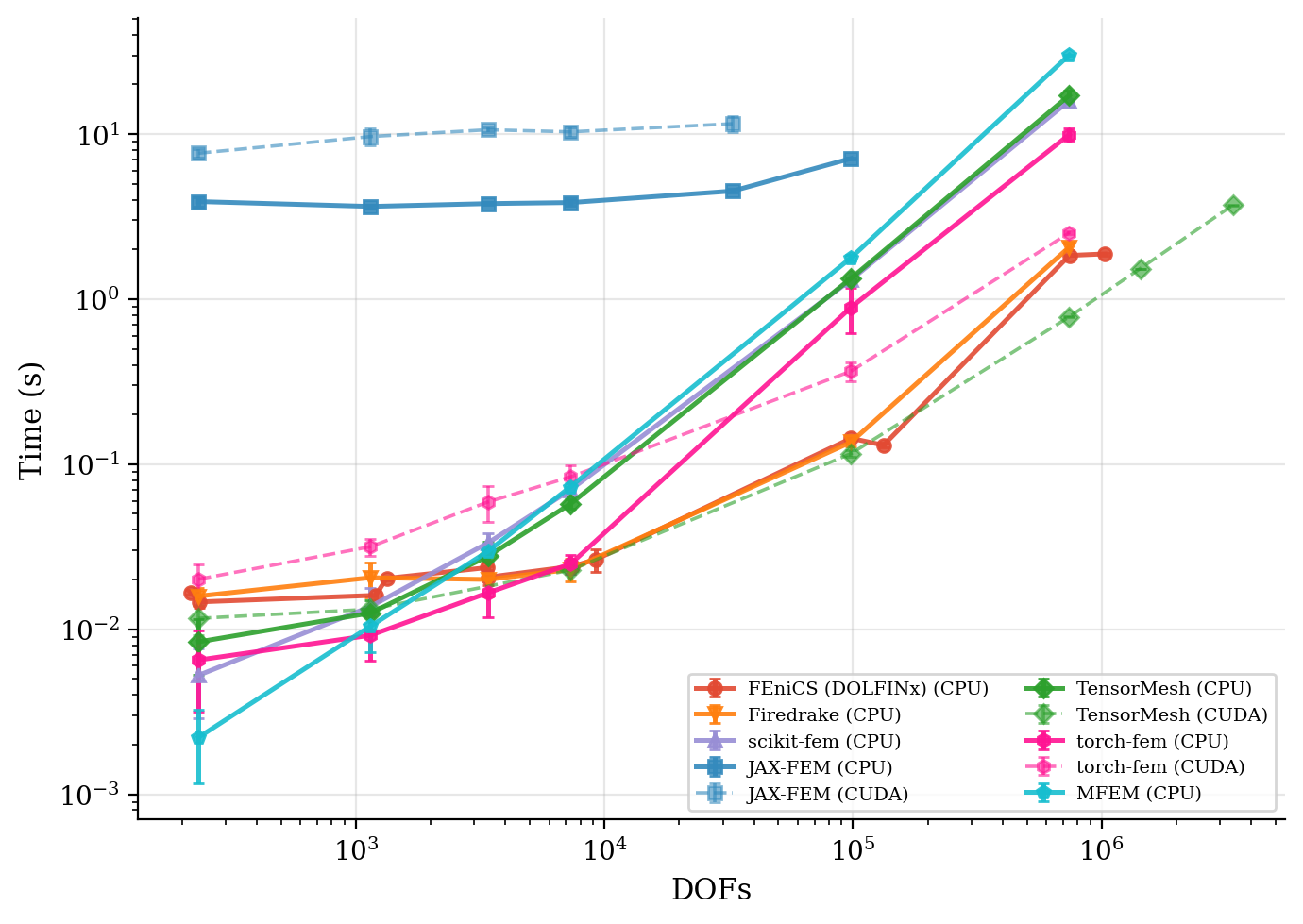
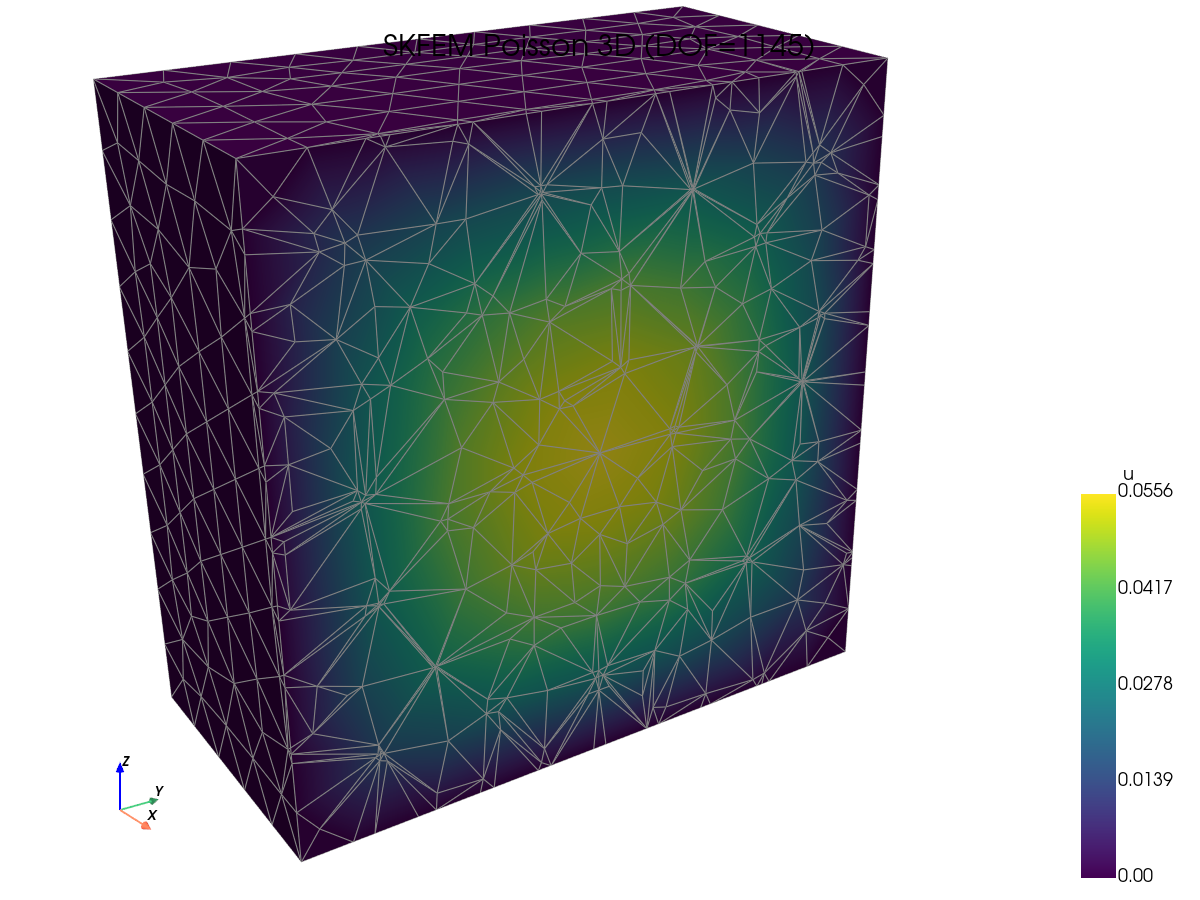
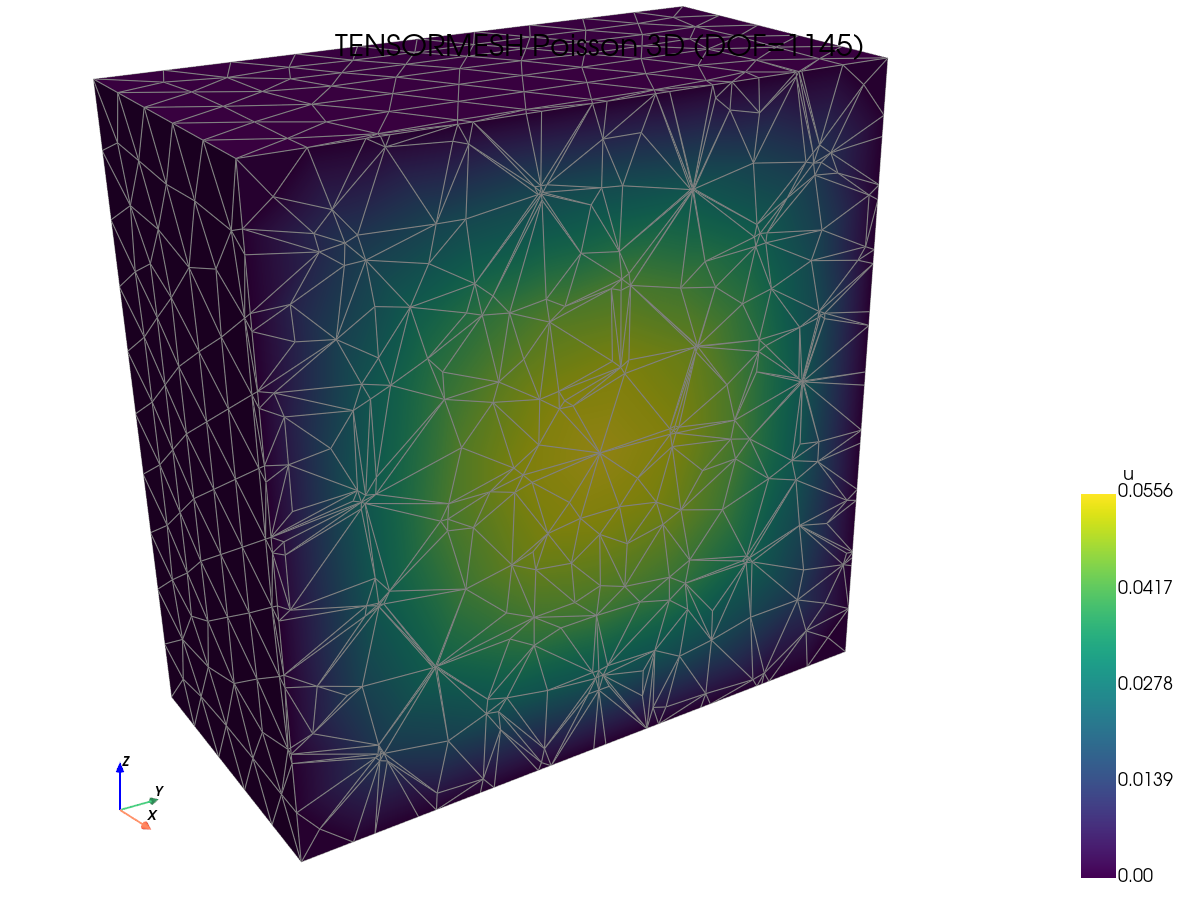
3D Poisson equation¶
On the unit cube \(\Omega = [0,1]^3\) we solve
with constant source \(f = 1\) and homogeneous Dirichlet boundary conditions on every face.
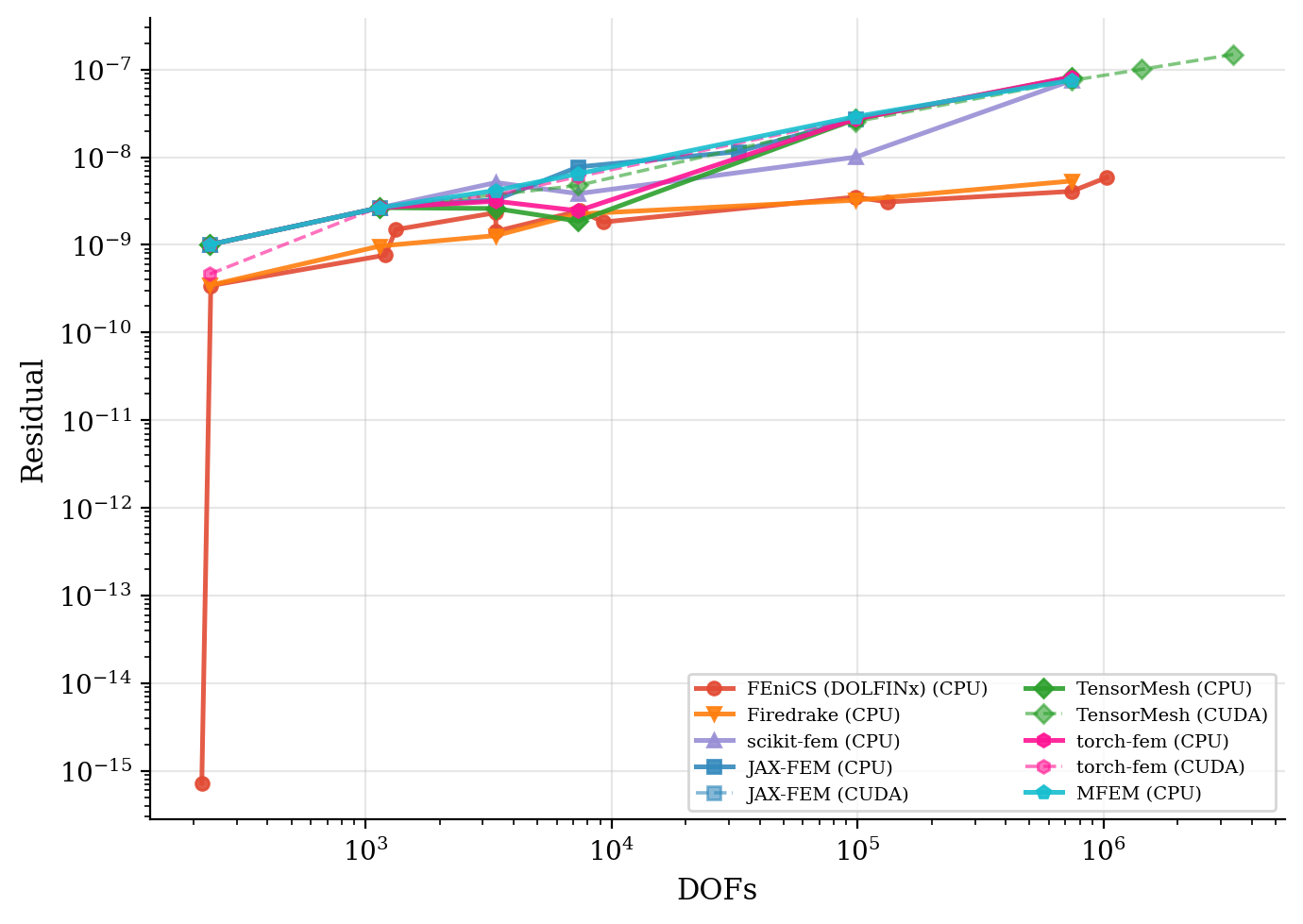
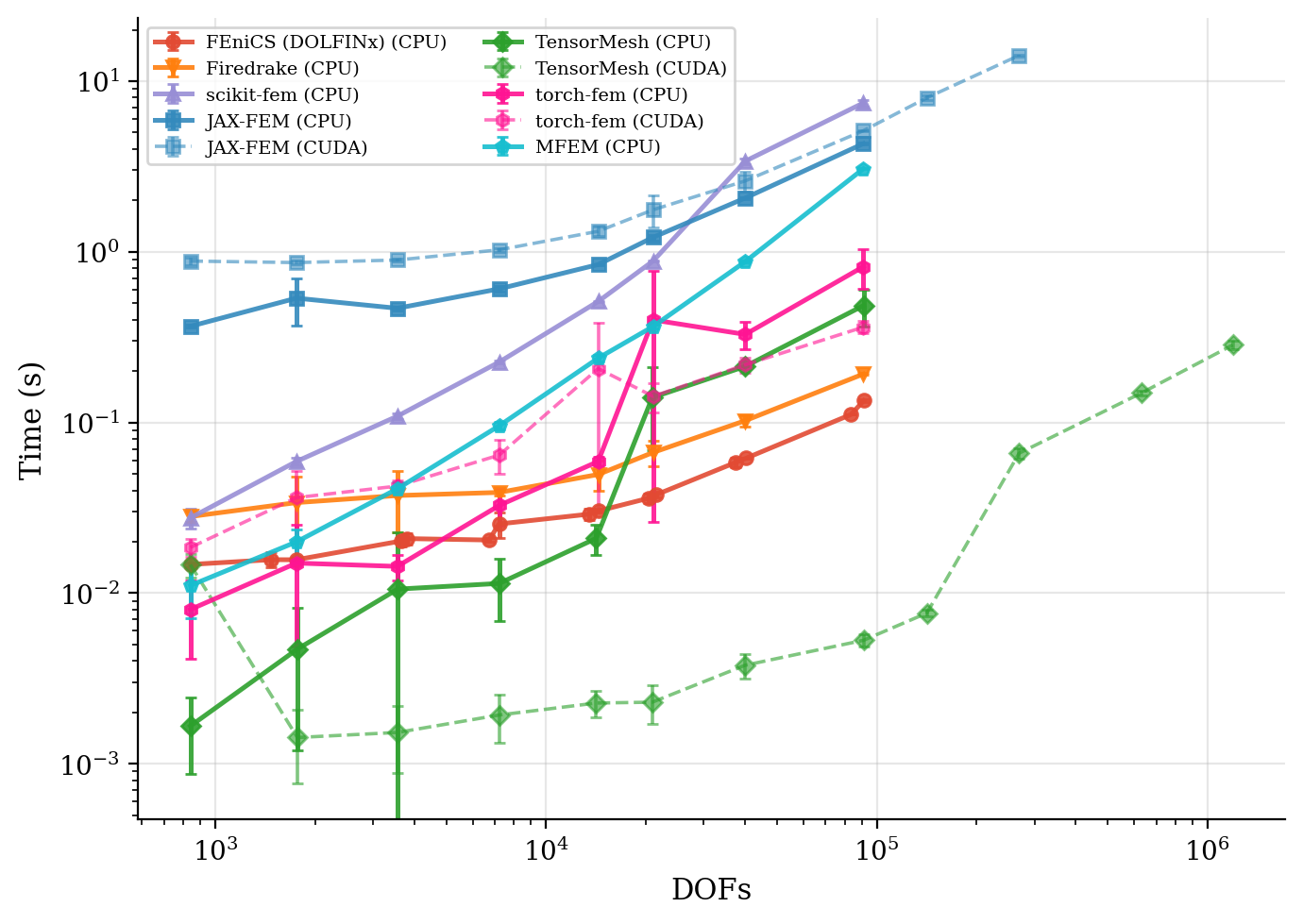
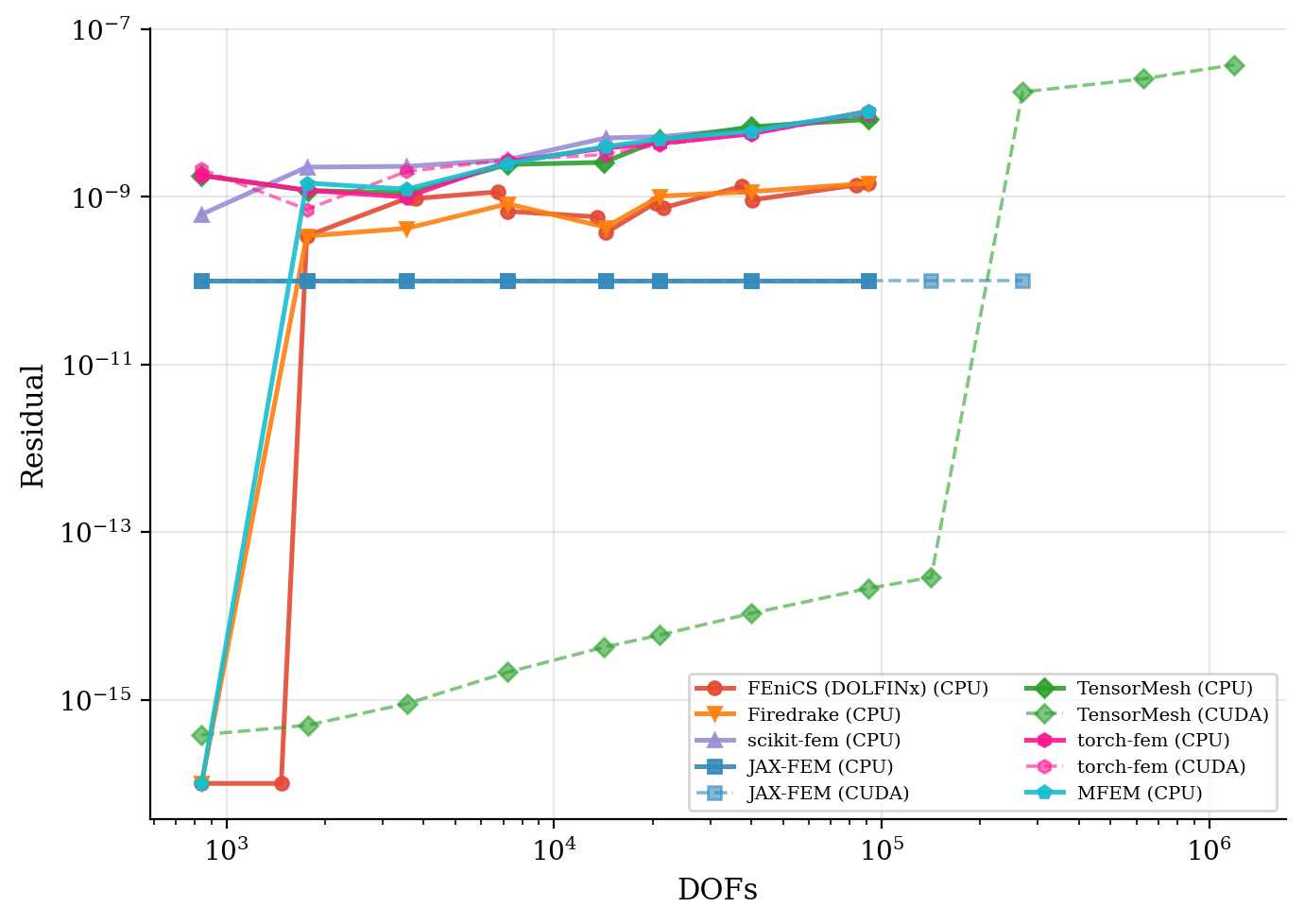
Solve time and residual convergence. Wall-clock time is plotted against problem size; residual histories show that every framework reaches the same target tolerance.
Solve time |
Residual convergence |
|
|
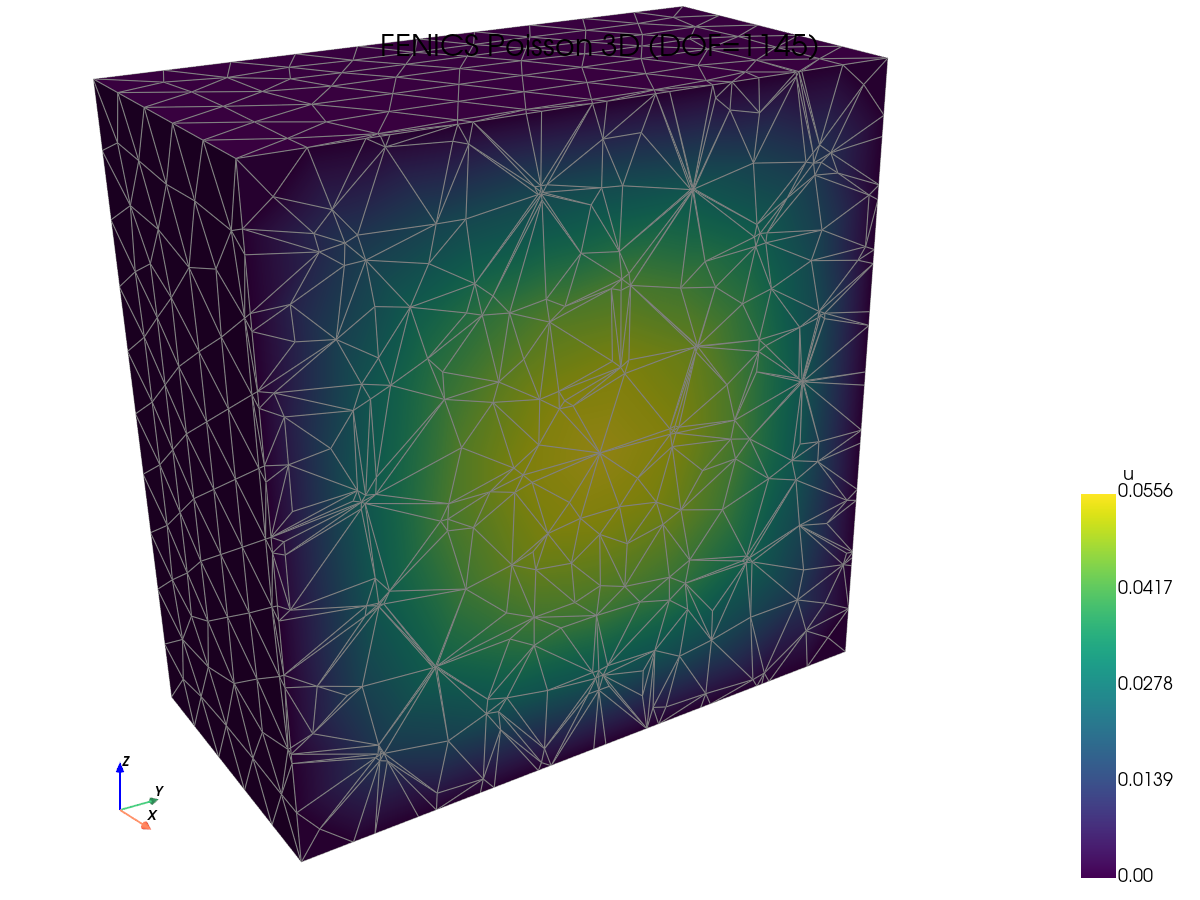
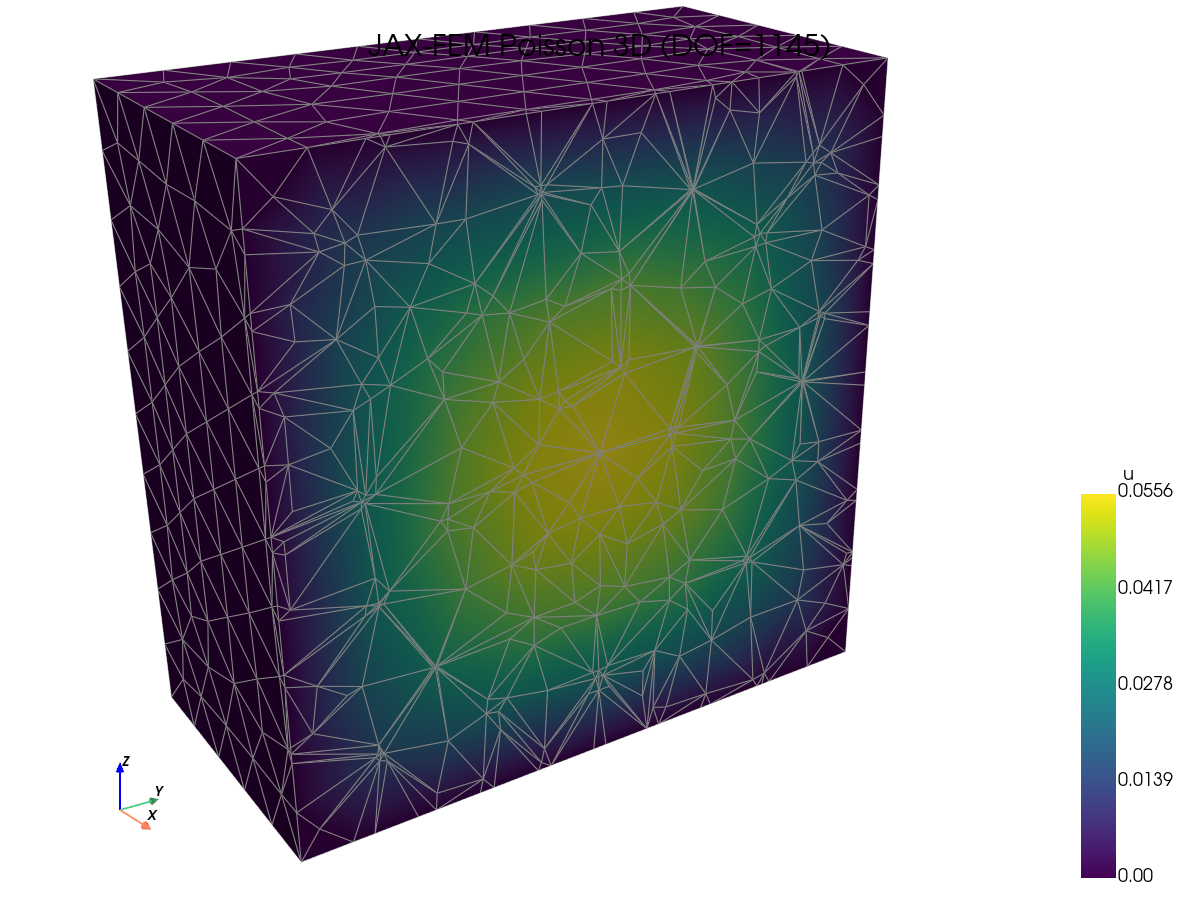
Solution visualizations. Spot-check that each framework produces the same field — useful as a sanity check before reading speed numbers.
FEniCS (DOLFINx) |
JAX-FEM |
scikit-fem |
TensorMesh |
|
|
|
|
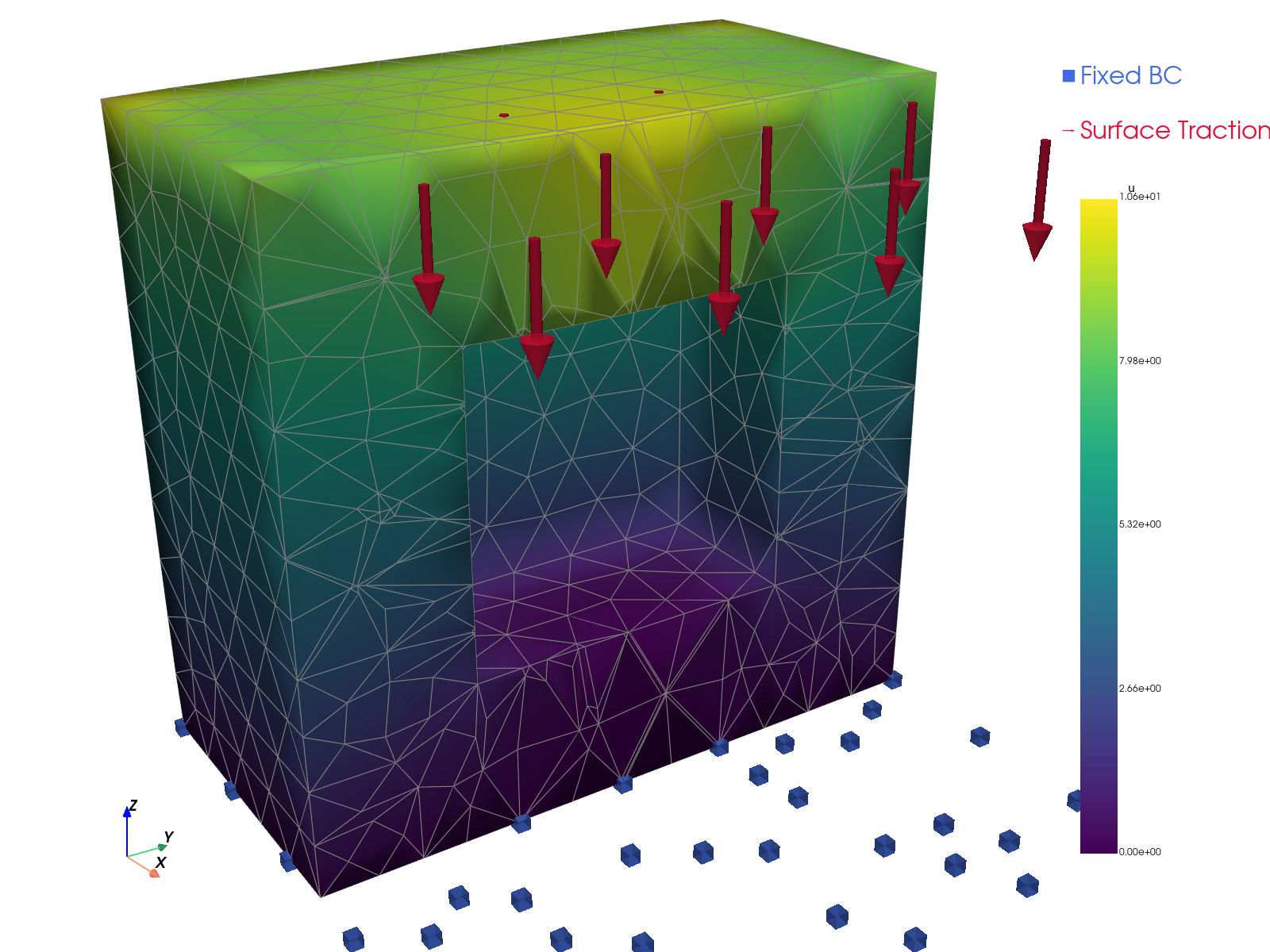
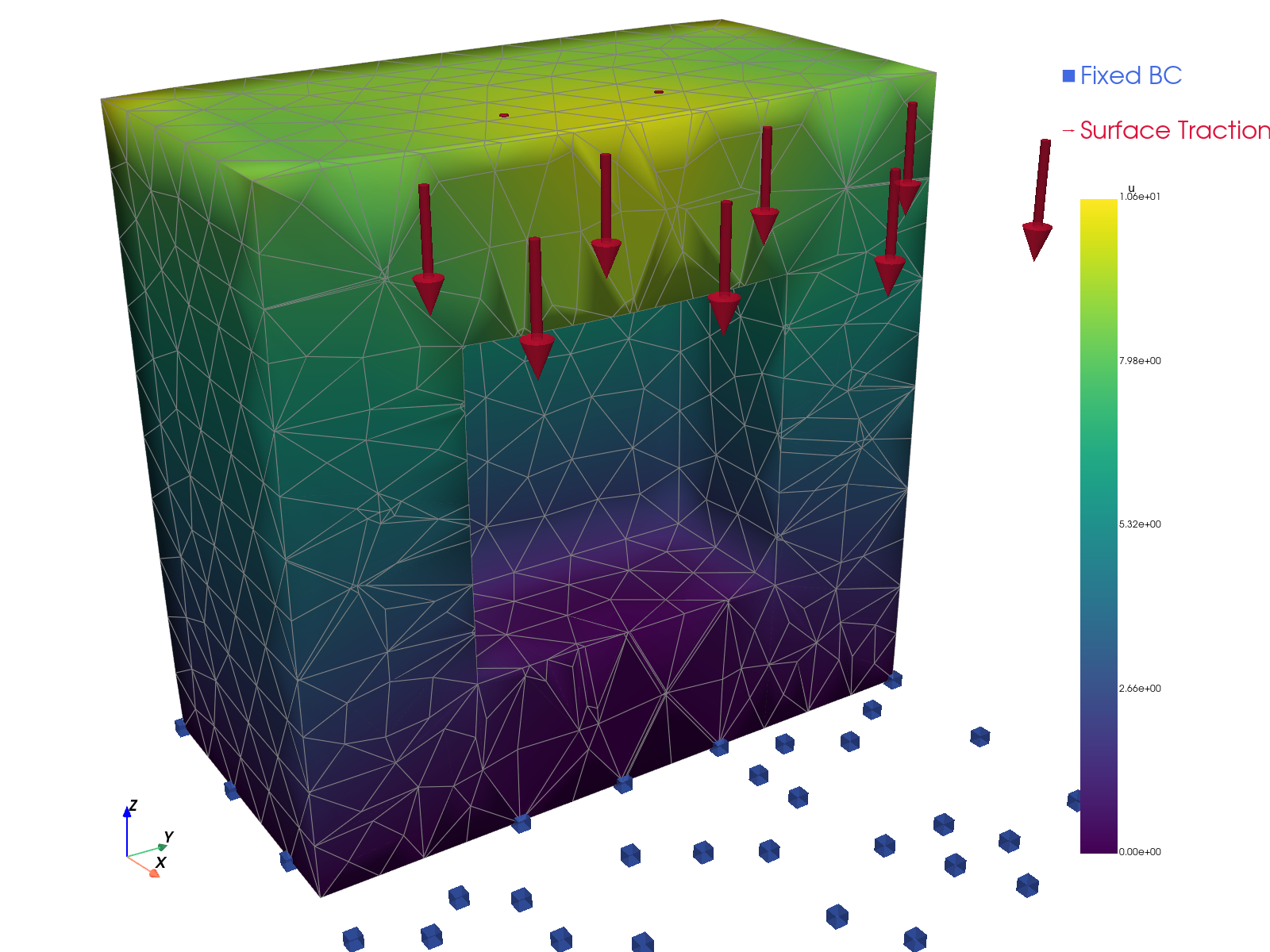
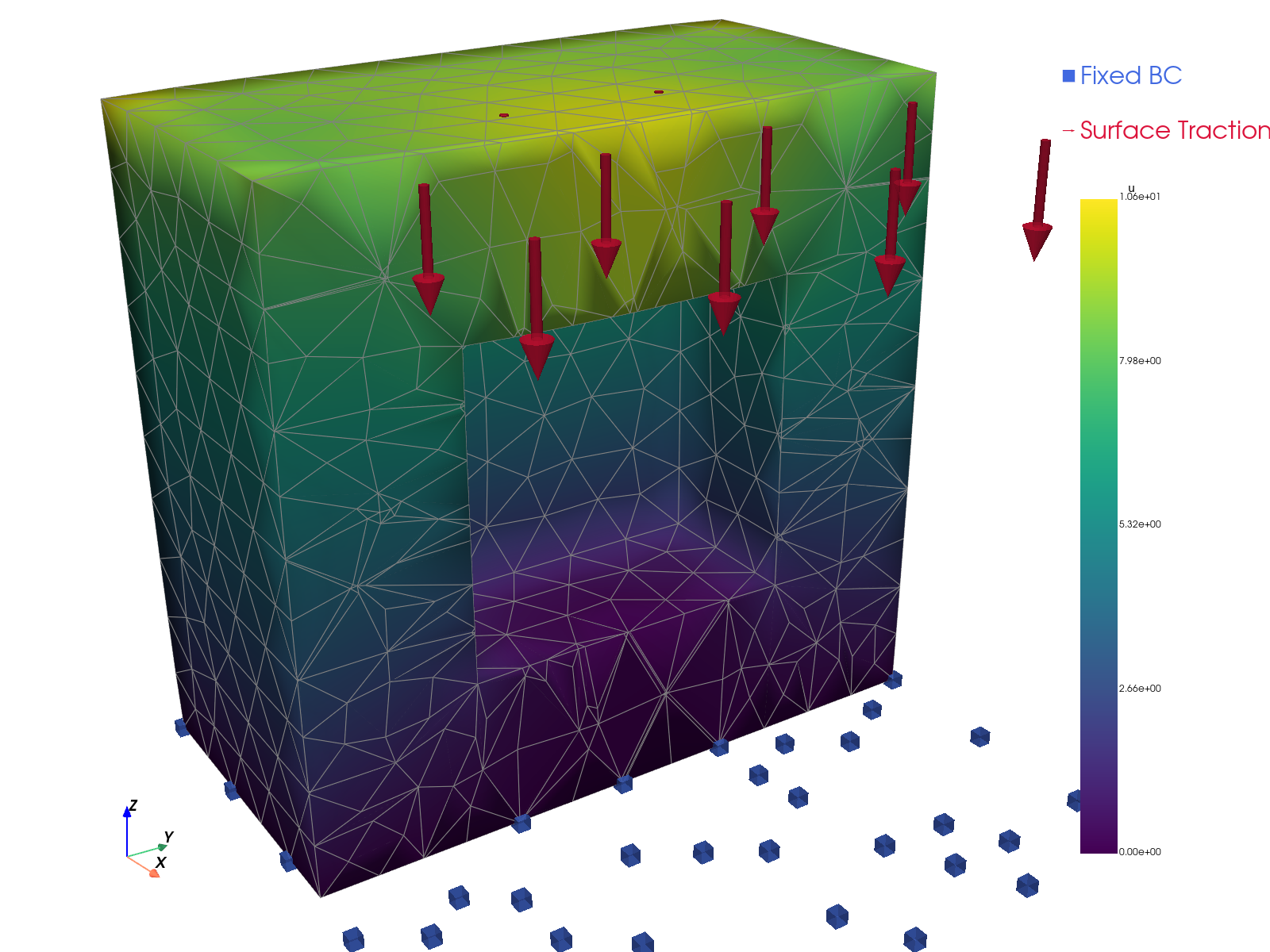
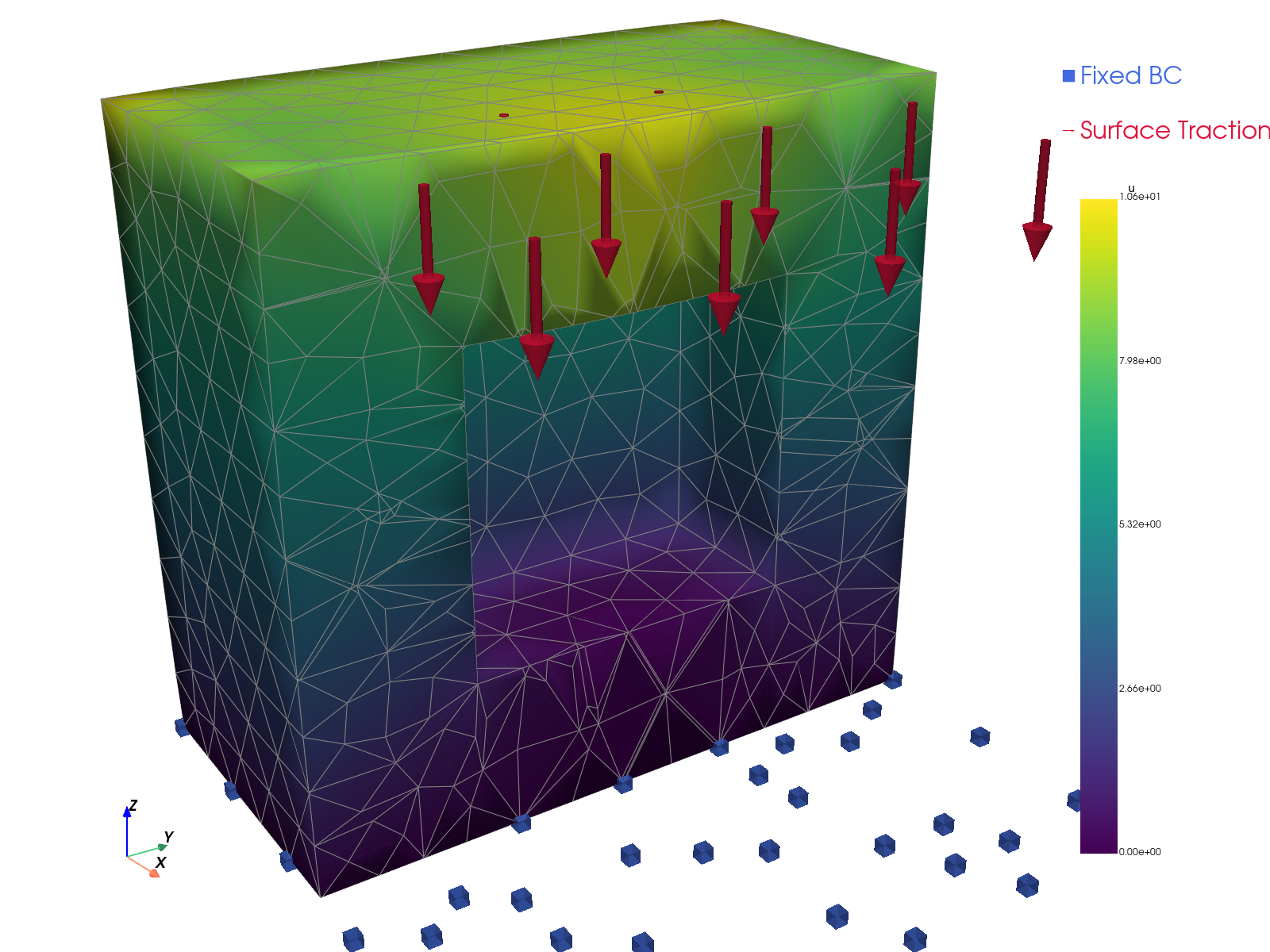
3D linear elasticity¶
We solve the static equilibrium of an isotropic linear elastic body:
where \(\mathbf{u} : \Omega \to \mathbb{R}^3\) is the displacement and the Cauchy stress satisfies Hooke’s law
We set Young’s modulus \(E = 1\) and Poisson’s ratio \(\nu = 0.3\), giving
A constant body force \(\mathbf{f} = (1,1,1)^\top\) is applied. To introduce geometric complexity we use a hollow cube domain
Solve time and residual convergence.
Solve time |
Residual convergence |
|
|
Solution visualizations.
FEniCS (DOLFINx) |
JAX-FEM |
scikit-fem |
TensorMesh |
|
|
|
|
Inverse problem: topology optimization¶
The inverse-problem benchmark exercises the differentiability of TensorMesh on a classical topology-optimization task: compliance minimization of a 2D cantilever beam using the Solid Isotropic Material with Penalization (SIMP) method. We compare against JAX-FEM, the only other framework in the list above that supports end-to-end automatic differentiation through the FEM pipeline.
Problem setup¶
The computational domain is a rectangle \(\Omega = [0, L_x] \times [0, L_y]\) with \(L_x = 60\) and \(L_y = 30\) (dimensionless), discretized into \(60 \times 30\) bilinear quadrilateral (QUAD4) elements — 1,891 nodes and 1,800 elements. Homogeneous Dirichlet conditions are imposed on the left edge,
and a distributed traction is applied to the lower portion of the right boundary,
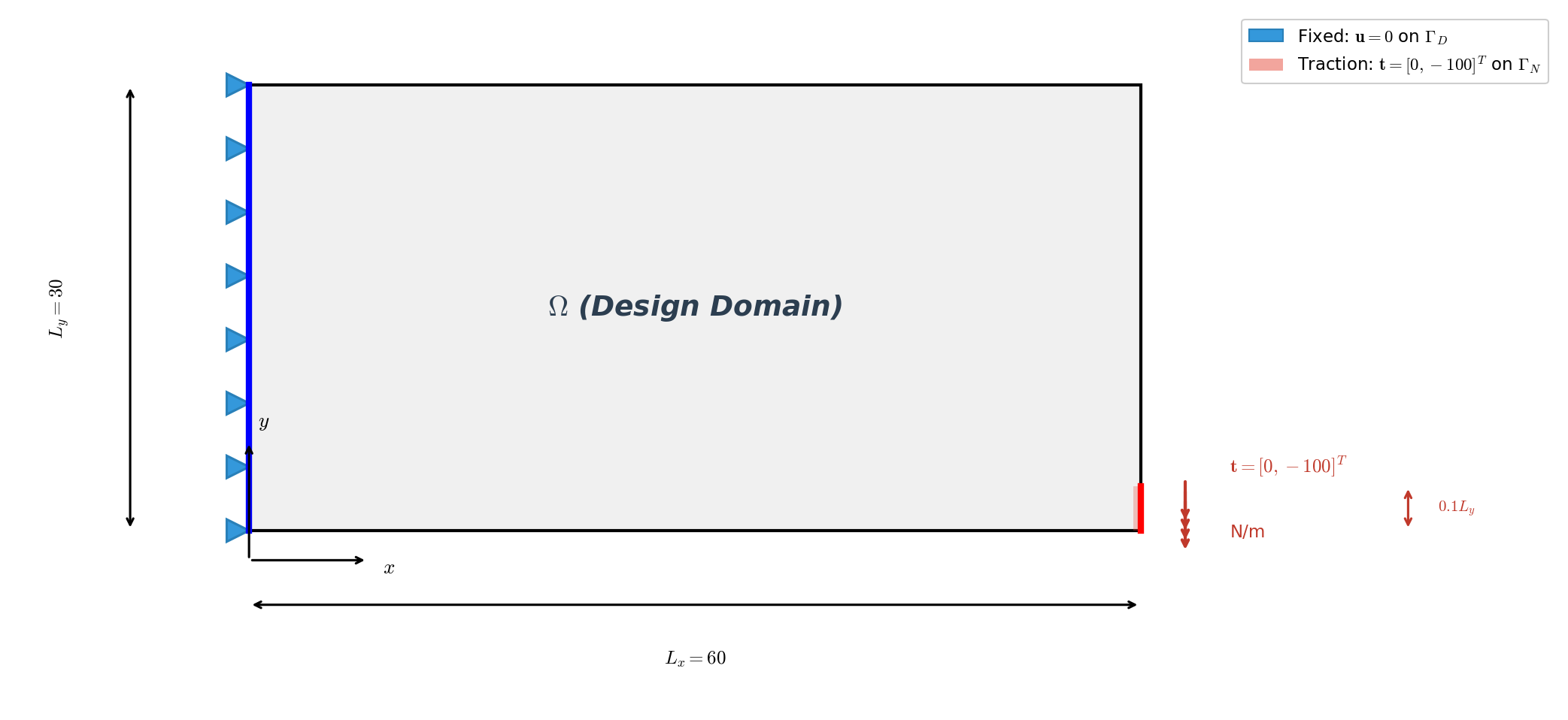
The element stiffness is parameterized by the SIMP interpolation
where \(\rho \in [\rho_{\min}, 1]\) is the element-wise density (the design variable), \(p = 3\) penalizes intermediate densities, \(E_{\max} = 70{,}000\) MPa is the solid stiffness, and \(E_{\min} = 70\) MPa keeps the stiffness matrix non-singular. The Poisson’s ratio is \(\nu = 0.3\).
The optimization minimizes structural compliance subject to a volume constraint:
with target volume fraction \(\bar{v} = 0.5\) and \(\rho_{\min} = 10^{-3}\). We use the Method of Moving Asymptotes (MMA) with move limit \(\Delta\rho_{\max} = 0.1\) and a sensitivity filter of radius \(r_{\min} = 1.5\,h\) (where \(h\) is the element size) to suppress checkerboard patterns. The optimization runs for 51 iterations.
Sensitivity via automatic differentiation¶
The classical adjoint-method sensitivity for SIMP has the closed form
where \(\mathbf{K}_0^e\) is the element stiffness at unit Young’s modulus. In TensorMesh this gradient is not implemented manually — it is obtained by backpropagating through the differentiable assembly and sparse solve via PyTorch’s reverse-mode autograd. The closed-form expression above is reproduced only for reference and as a consistency check against the autograd output.
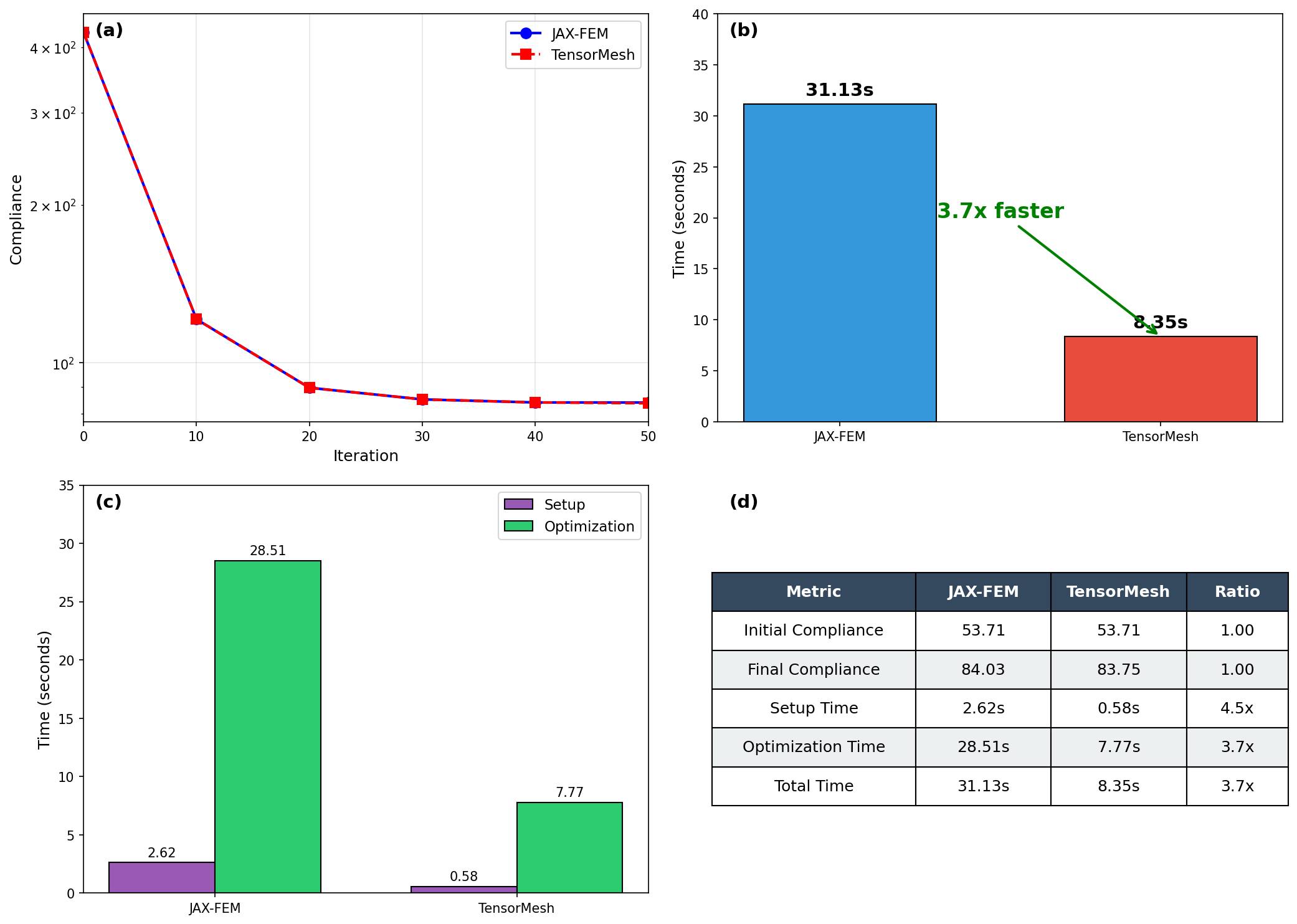
Final design comparison¶
Both frameworks converge to the same canonical truss-like topology, and TensorMesh runs noticeably faster end-to-end thanks to GPU-resident assembly and solve.
Optimization animations¶
JAX-FEM |
TensorMesh |
|
|