Geomechanics: Drucker-Prager strip footing¶
This example combines the two existing example-only geomechanics building blocks into one nonlinear boundary-value problem: the local Drucker-Prager triaxial constitutive driver and the elastic strip-footing setup. A rectangular soil block is loaded by a centered strip footing, the footing pressure is ramped in load steps, and the per-quadrature Drucker-Prager history is committed after each converged step.
It is deliberately example-only. It does not add a public geomechanics API; the constitutive code is copied locally (Torch only) so the script is self-contained. TensorMesh keeps the internal solid-mechanics convention stress tension-positive. For geomechanics reporting, settlement is shown positive downward,
This is a compact educational example, not a foundation-design method.
Problem¶
The model is a two-dimensional plane-strain-style soil block with unit out-of-plane thickness. The constitutive model is small-strain, associated Drucker-Prager plasticity with linear isotropic hardening, written internally with the tension-positive yield function
Boundary conditions¶
The example reuses the elastic footing roller setup:
bottom boundary: vertical displacement fixed,
u_y = 0;left and right boundaries: horizontal displacement fixed,
u_x = 0;top boundary: free except for the loaded footing patch.
The footing pressure is lumped over the top-surface nodes inside the footing patch.
Solver¶
Because the problem is now path-dependent, it is solved by nonlinear energy
minimization with load stepping. At each load step the total potential energy
internal - external is minimized over the free displacement DOFs with
L-BFGS. The example follows the same per-quadrature history lifecycle as the
drucker_prager_triaxial example:
per-quadrature history variables are stored in
self.history[etype];previous-step
eps_pandalphaare passed throughelement_data;update_state(u)is called after each converged load step undertorch.no_grad().
Sanity checks¶
The script reports the final footing settlement, the maximum settlement, the maximum and mean committed plastic history, and the plastic centroid.
The associated test checks that the footing settles downward, that the committed plastic history and settlement grow monotonically with load, that the plastic zone localizes under the footing, that a low-load / high-cohesion case stays essentially elastic and matches the elastic footing settlement, and that a higher-cohesion soil develops less plasticity.
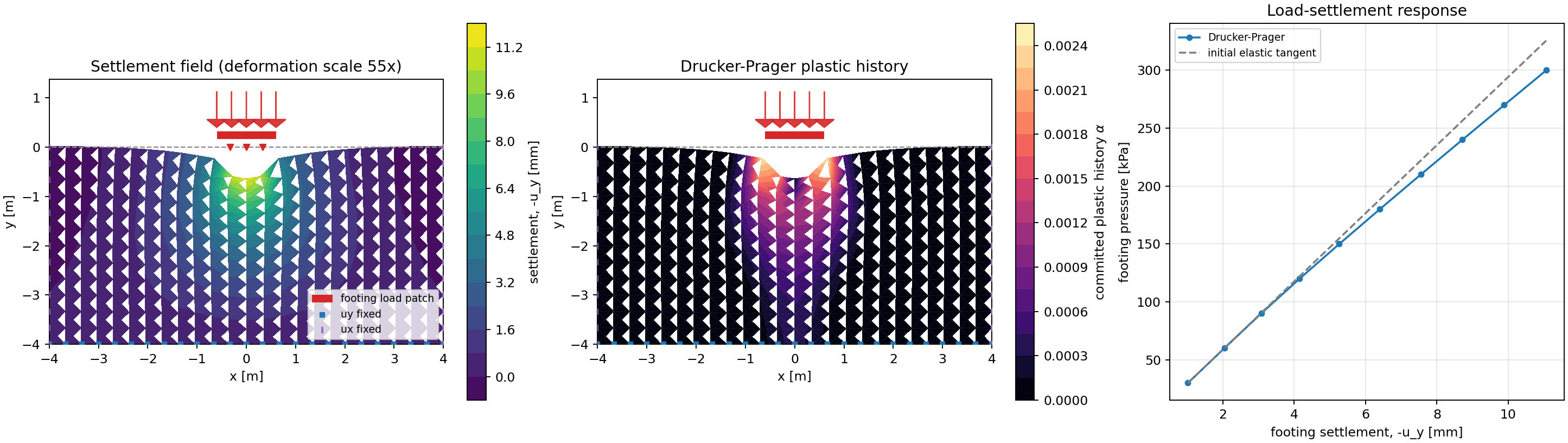
Fig. 47 Output of drucker_prager_footing.py. The left panel shows the
deformed soil mesh colored by settlement -u_y. The middle panel shows
the committed Drucker-Prager plastic history variable, which develops
beneath the footing. The right panel shows the load-settlement curve,
including nonlinear growth as plasticity accumulates. Deformations are
exaggerated for visibility.¶
Running it¶
cd examples/solid/geomechanics/drucker_prager_footing
python drucker_prager_footing.py
For a fast numerical-only run without writing the plot:
python drucker_prager_footing.py --no-plot --steps 6 --chara-length 0.60
Core implementation¶
The load-stepped nonlinear solver is the heart of the example. It reuses the
local Drucker-Prager assembler’s energy, element_data_from_history and
update_state methods.
def solve_drucker_prager_footing(
problem: FootingProblem,
params: DruckerPragerParameters,
n_steps: int = 10,
dtype: torch.dtype = torch.float64,
device: str | torch.device = "cpu",
lbfgs_max_iter: int = 50,
) -> Dict[str, Any]:
"""Solve the footing problem with Drucker-Prager plasticity and load stepping.
The total potential energy ``internal - external`` is minimized over the free
displacement DOFs with L-BFGS at each load step. After each converged step
the per-quadrature Drucker-Prager history is committed with ``update_state``.
"""
device = torch.device(device)
mesh = build_mesh(problem, dtype=dtype, device=device)
dp = DruckerPragerPlasticity.from_mesh(mesh, params=params)
dim = mesh.dim
n_points = mesh.n_points
n_dof = n_points * dim
fixed = make_boundary_mask(mesh, problem)
rhs_full, loaded_nodes, total_vertical_load = make_load_vector(mesh, problem)
rhs_full_flat = rhs_full.flatten()
free_flat = (~fixed).flatten()
free_idx = torch.where(free_flat)[0]
base_zeros = torch.zeros(n_dof, dtype=dtype, device=device)
free_u = torch.zeros(free_idx.numel(), dtype=dtype, device=device, requires_grad=True)
def recover_full(free_values: torch.Tensor) -> torch.Tensor:
"""Scatter the free DOFs into a full [n_points, dim] displacement field."""
u_flat = base_zeros.index_add(0, free_idx, free_values)
return u_flat.reshape(n_points, dim)
load_factors: List[float] = []
pressures_kpa: List[float] = []
footing_settlements: List[float] = []
max_settlements: List[float] = []
max_alphas: List[float] = []
mean_alphas: List[float] = []
for step in range(1, n_steps + 1):
load_factor = step / n_steps
f_ext_flat = load_factor * rhs_full_flat
optimizer = torch.optim.LBFGS(
[free_u],
max_iter=lbfgs_max_iter,
tolerance_grad=1.0e-10,
tolerance_change=1.0e-14,
history_size=50,
line_search_fn="strong_wolfe",
)
def closure() -> torch.Tensor:
optimizer.zero_grad()
u_full = recover_full(free_u)
internal = dp.energy(
point_data={"displacement": u_full},
element_data=dp.element_data_from_history(),
)
external = torch.dot(f_ext_flat, u_full.flatten())
loss = internal - external
loss.backward()
return loss
optimizer.step(closure)
with torch.no_grad():
u_full = recover_full(free_u)
dp.update_state(u_full)
settlement = -u_full[:, 1]
load_factors.append(float(load_factor))
pressures_kpa.append(float(load_factor * problem.footing_pressure / 1.0e3))
footing_settlements.append(float(settlement[loaded_nodes].mean()))
max_settlements.append(float(settlement.max()))
max_alphas.append(float(dp.max_alpha()))
mean_alphas.append(float(dp.mean_alpha()))
with torch.no_grad():
u_final = recover_full(free_u).detach()
return {
"mesh": mesh,
"dp": dp,
"u": u_final,
"fixed": fixed,
"loaded_nodes": loaded_nodes,
"total_vertical_load_N_per_m": total_vertical_load,
"load_factors": load_factors,
"pressures_kpa": pressures_kpa,
"footing_settlements_m": footing_settlements,
"max_settlements_m": max_settlements,
"max_alphas": max_alphas,
"mean_alphas": mean_alphas,
"n_nodes": int(n_points),
"n_steps": int(n_steps),
}
What’s next¶
This example stays intentionally example-only. A natural follow-up would be to
promote a stabilized geomechanics assembler into tensormesh/assemble/ once
the model surface and public API direction are agreed.