Magnetostatics (Maxwell)¶
A 3D magnetostatics problem: recover the magnetic field around a
current-carrying wire by solving for the magnetic vector
potential \(\mathbf{A}\) on the unit cube. The script
examples/maxwell/magnetostatic.py uses continuous nodal Lagrange
elements with the stabilized mixed formulation of Badia & Codina
(2012) [BC2012], which makes the curl-curl problem well-posed on
standard (non-curl-conforming) nodal spaces.
Note
TensorMesh ships continuous nodal Lagrange elements. The natural space for \(\nabla\times\nabla\times\) is the curl-conforming Nédélec edge element, which is not native yet — so this example takes the same pragmatic route as the lid-driven cavity: solve on equal-order nodal spaces and add consistent stabilization (here a Coulomb-gauge Lagrange multiplier plus grad-div and multiplier terms) to suppress the spurious modes. More specialized FE spaces will be added gradually.
Problem¶
Magnetostatics is Ampère’s law \(\nabla\times\mathbf{H}=\mathbf{J}\) together with \(\nabla\cdot\mathbf{B}=0\) and \(\mathbf{B}=\mu\mathbf{H}\). Writing \(\mathbf{B}=\nabla\times\mathbf{A}\) satisfies the divergence constraint identically and — with reluctivity \(\nu=1/\mu\) absorbed into a nondimensional scaling — reduces Ampère’s law to the curl-curl equation for \(\mathbf{A}\):
where the scalar \(p\) is a Lagrange multiplier enforcing the Coulomb gauge \(\nabla\cdot\mathbf{A}=0\). The gauge is not optional: the curl-curl operator annihilates every gradient field, so its kernel is enormous and \(\mathbf{A}\) is only unique up to \(\nabla\phi\) without it.
Boundary conditions are the homogeneous tangential trace
i.e. on each axis-aligned face the two tangential components of \(\mathbf{A}\) are fixed to zero (on \(x=0,1\) that is \(A_y\) and \(A_z\)), the constraints combining along the edges and corners.
Current source. A smooth \(z\)-directed channel through the centre of the cube — a soft model of a straight wire,
with \(J_0 = 100\), centre \((x_c, y_c) = (0.5, 0.5)\), and width \(\sigma = 0.08\). It is \(z\)-invariant, so \(\nabla\cdot\mathbf{J} = 0\); in free space such a current produces a purely azimuthal field circling the wire, which is the qualitative signature to look for.
Stabilized weak form¶
Find \((\mathbf{A}_h, p_h) \in V_h \times Q_h\) in continuous Lagrange spaces such that, for all \((\mathbf{v}_h, q_h)\),
with the forms
The two stabilization terms are what make the nodal discretization robust: the grad-div penalty \(s_u\) controls the divergence of \(\mathbf{A}\), and \(s_p\) regularizes the multiplier — this is equation (3.6) of [BC2012]. The demo uses a constant length scale \(h^2 = \texttt{chara\_length}^2\) for every element. Assembled, the four forms become a 2×2 block saddle-point system
TensorMesh setup¶
Each bilinear form is one small ElementAssembler
whose forward returns the per-node block. The curl-curl form, for
instance, builds the two skew-symmetric cross-product matrices
\([\nabla N]_\times\) and contracts them — column \(a\) of
\([\nabla N]_\times\) is exactly \(\nabla\times(N\,\mathbf{e}_a)\),
so the contraction is the \([3,3]\) block
\((\nabla\times\mathbf{u})\cdot(\nabla\times\mathbf{v})\):
class CurlCurlAssembler(ElementAssembler):
"""(curl u, curl v) for 3D vector nodal fields."""
def forward(self, gradu, gradv):
zero = torch.zeros_like(gradu[0])
curl_u = torch.stack((torch.stack((zero, -gradu[2], gradu[1])),
torch.stack((gradu[2], zero, -gradu[0])),
torch.stack((-gradu[1], gradu[0], zero))))
curl_v = ... # the same, built from gradv
return curl_u.T @ curl_v # [3, 3] block
A = CurlCurlAssembler.from_mesh(mesh)()
Su = DivergenceStabilizationAssembler.from_mesh(mesh, h2=h2)() # h^2 (div u, div v)
Sp = PressureStabilizationAssembler.from_mesh(mesh)() # (grad p, grad q)
B = PressureCouplingAssembler.from_mesh(mesh)() # -(grad p, v)
K = SparseMatrix.combine([[A + Su, B],
[-1.0 * B.T, Sp]])
A few details worth flagging:
Block assembly.
SparseMatrix.combinetiles the four sparse blocks into the saddle-point matrix, so the vector \(\mathbf{A}\) DOFs and the scalar \(p\) DOFs share one linear system.Tangential BC as a DOF mask.
tangential_vector_potential_maskbuilds the per-component Dirichlet mask for \(\mathbf{n}\times\mathbf{A}=\mathbf{0}\); concatenated withmesh.boundary_maskfor \(p\), it feeds a singleCondenserthat condenses out every constrained DOF before the solve.Recovering the field. \(\mathbf{B}=\nabla\times\mathbf{A}\) is a derived, element-wise quantity. The script projects it back to a smooth nodal field by an \(L^2\) projection — assemble a
MassElementAssembler, build the curl right-hand side with aNodeAssembler, and solve \(M\,\mathbf{B} = \tilde{\mathbf{B}}\) component-wise. This is the same recipe the cylinder flow uses to recover vorticity.
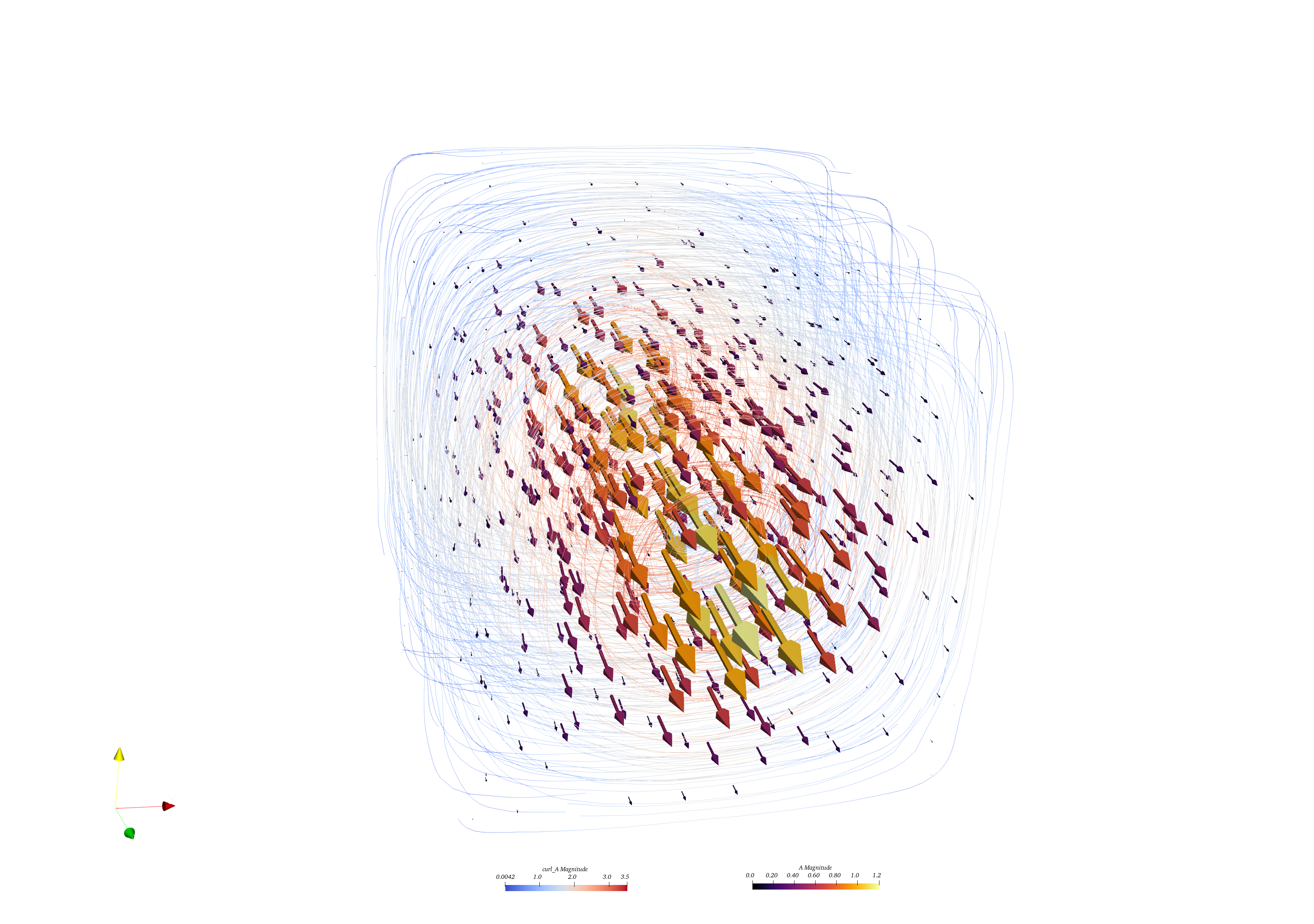
Fig. 54 Output of magnetostatic.py (rendered in ParaView): streamlines
of \(\mathbf{B}=\nabla\times\mathbf{A}\), viewed roughly down
the \(z\) axis. The warm glyphs at the centre mark the
\(z\)-directed current channel; the field lines wrap
azimuthally around it — the right-hand-rule pattern of a straight
wire — while the finite cube boundary gently squares off the outer
loops.¶
Running it¶
cd examples/maxwell
python magnetostatic.py # writes magnetostatic_3d.vtu
The solve writes magnetostatic_3d.vtu with two nodal point
fields, the vector potential A and the magnetic field
curl_A \(= \nabla\times\mathbf{A}\). Open it in ParaView and
apply Stream Tracer or Glyph to curl_A to reproduce the figure
above. The mesh size and current settings live at the top of
main() if you want to experiment.
What’s next¶
Lid-Driven Cavity — the same “equal-order nodal + consistent stabilization” strategy, there to satisfy the incompressible Navier-Stokes inf-sup condition.
Forms — vector-valued
forwardreturns and the per-node block convention shared by every assembler here.Boundary Conditions — DOF masking and static condensation for vector unknowns.